このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
MCUを使用したC2000 DC-DC降圧コンバータ
この例では、DC-DC 降圧コンバータ電源レギュレータ アプリケーションを開発する方法を示します。電力変換のシミュレーションと展開における一般的な課題は次のとおりです。
降圧コンバータ回路のアナログ回路動作のモデリング
MCU上のPWM出力とADCサンプリングのタイミング動作のモデリング
高CPU負荷コントローラーでの信号キャプチャ
コントローラの検証に必要な時間(通常はハードウェア上で実行される)
この例では、C2000™ Microcontroller Blockset と Simscape ™ を使用してこれらの課題に対処します。この例で使用されるデジタル制御タイプは電圧モード コントローラー (VMC) であり、TI Delfino F28379D LaunchPad および TI BOOSTXL-BUCKCONV キット で検証されています。
必要なハードウェア
ハードウェアの接続
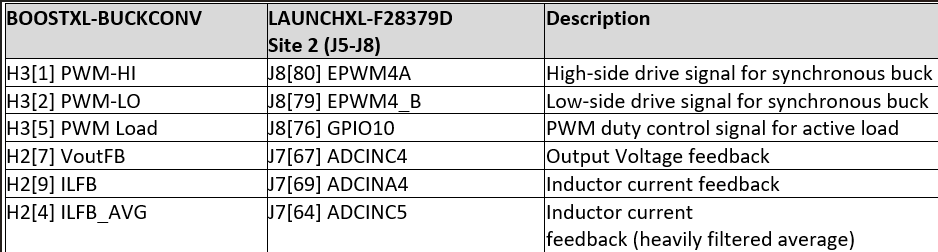
次の表に示すように、デジタル電源降圧コンバータ BoosterPack (BOOSTXL-BUCKCONV) をTexas Instruments Delfino F28379D LaunchPadに接続します。
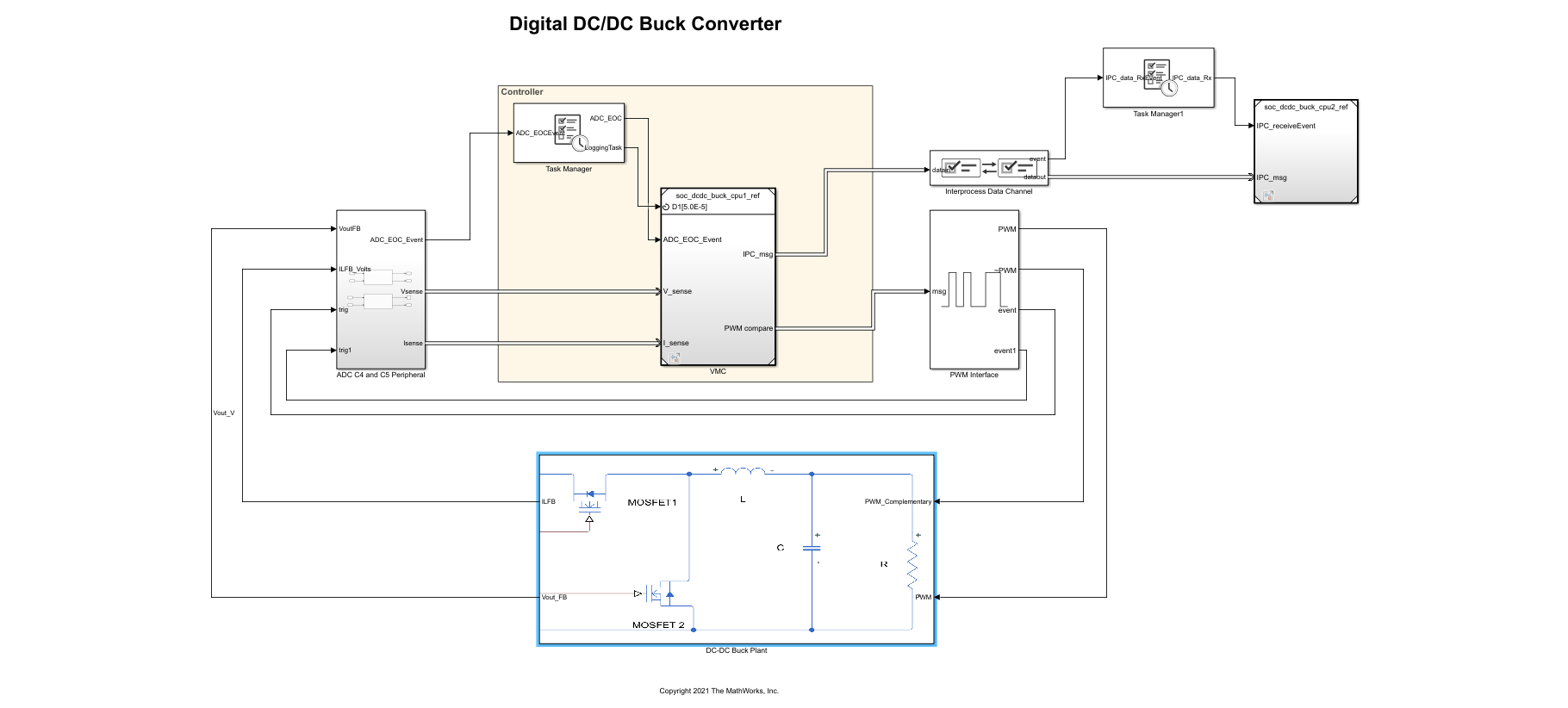
このモデルは完全なコンバータ システムを示しており、この例のセクションでは個体の課題を検討します。soc_dcdc_buck モデルを開きます。
DC-DC 降圧コンバータキットのモデル
DC-DC Buck Plant サブシステムは、DC-DC 降圧コンバータのアナログ回路の Simscape リファレンス モデルです。
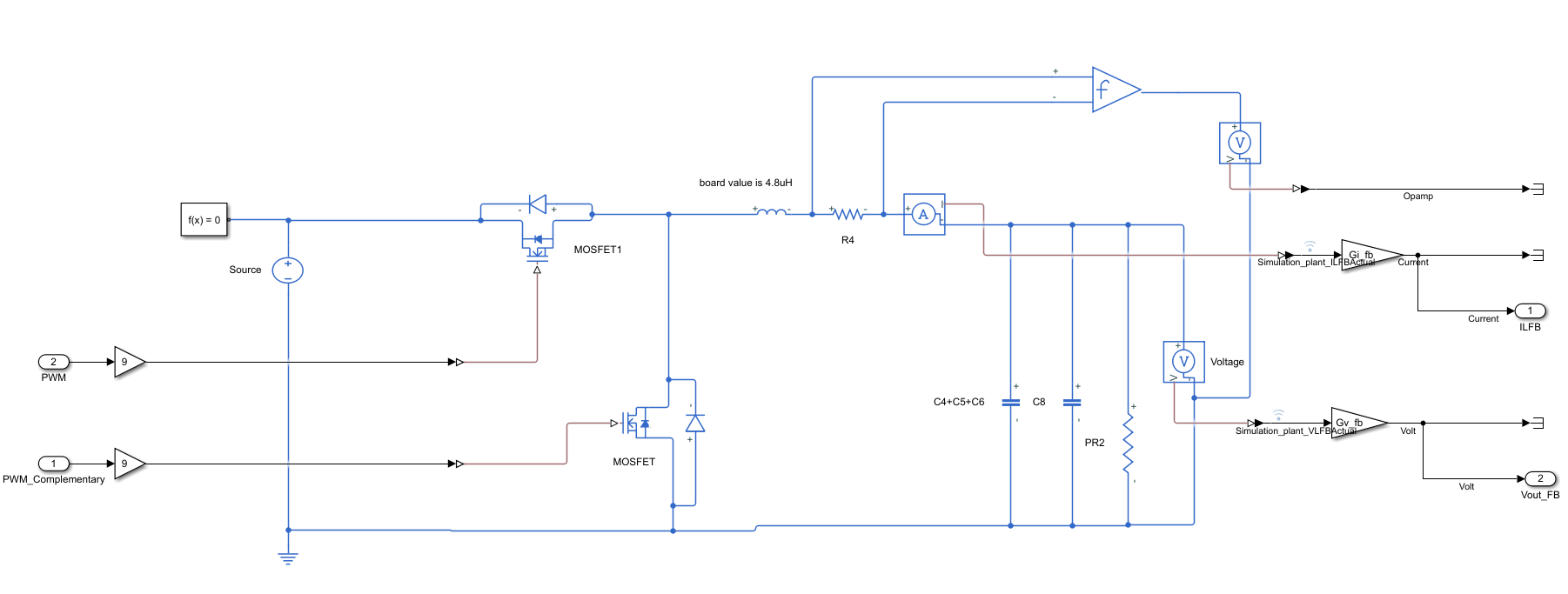
モデル内の Simscape ™ ブロックは、データシートに記載されている OEM (相手先ブランド供給) の仕様に基づいて選択および構成されます。動作に影響を与えずにシミュレーションの計算効率を実現するために、モデルには OEM 仕様に対する次の簡略化が組み込まれています。
電圧および電流検出回路はゲイン ブロックに簡素化されています。
MOSFETS は理想的な MOSFET に簡略化されています。
ゲート ドライバーはモデル化されておらず、その伝播遅延は考慮されていません。
インダクタは線形インダクタに簡略化されます。
すべての部品は公称値でモデル化されており、許容差は考慮されません。
DC 電源は一定であると想定されます。
必要に応じて、Simscape モデルのオープン ループ応答を、Data Acquisition Toolbox を使用してキャプチャされた結果とデジタル オシロスコープを使用して物理ハードウェアと比較および検証できます。
MCUの電圧モード制御
MCU では、プラントの出力が ADC Interface によってサンプリングされ、end of conversion ごとにイベントが生成されます。Task Manager は、各ADC変換終了イベントを受信すると、 ADCと呼ばれるイベント駆動型タスクを実行します。ADC割り込みタスクには、各ADC変換イベントに応答して非同期的に実行されるフィードバック制御アルゴリズムが含まれています。制御アルゴリズムは、 ADC読み取りを通じてフィードバックを受け取り、PWM Write ブロックのデューティ サイクル値を生成します。PWM Interface ブロックは、次のADC変換を開始するためのイベントのトリガーを含む PWM 動作をシミュレートします。PWM周波数は200kHzに設定されています。離散比例積分 (PI) コントローラは、基準電圧と出力電圧間の誤差を最小限に抑えます。PI コントローラのデューティ サイクルは、PWM 時間周期の 40% に制限されます。
システムは 1 ボルトの初期電圧基準から開始され、定常状態に到達できます。これにより、物理ハードウェアとシミュレーション間の公平な制御が可能になり、既知の状態と比較できるようになります。次に、2 ボルトの目的の電圧ステップが 50 ミリ秒でトリガーされ、閉ループ コントローラーのステップ応答が検査されます。モデルをシミュレートするには、再生 をクリックします。シミュレーション データ インスペクター を開いて信号を表示します。
ハードウェアに対するシミュレーション結果を検証するには、モデルをTexas Instruments Delfino F28379D LaunchPadにデプロイします。System on Chip タブで、Configure, Build, & Deploy をクリックして、SoC Builder ツールを開きます。この図は、シミュレーションと物理ハードウェア上に展開されたモデル間のコントローラー応答の比較を示しています。ハードウェア上のこの信号は、デジタル オシロスコープを使用してキャプチャされます。コントローラの高周波数動作により、同じ CPU 上で外部モードを直接使用できなくなります。このため、これらの測定にはデジタル オシロスコープが使用されます。
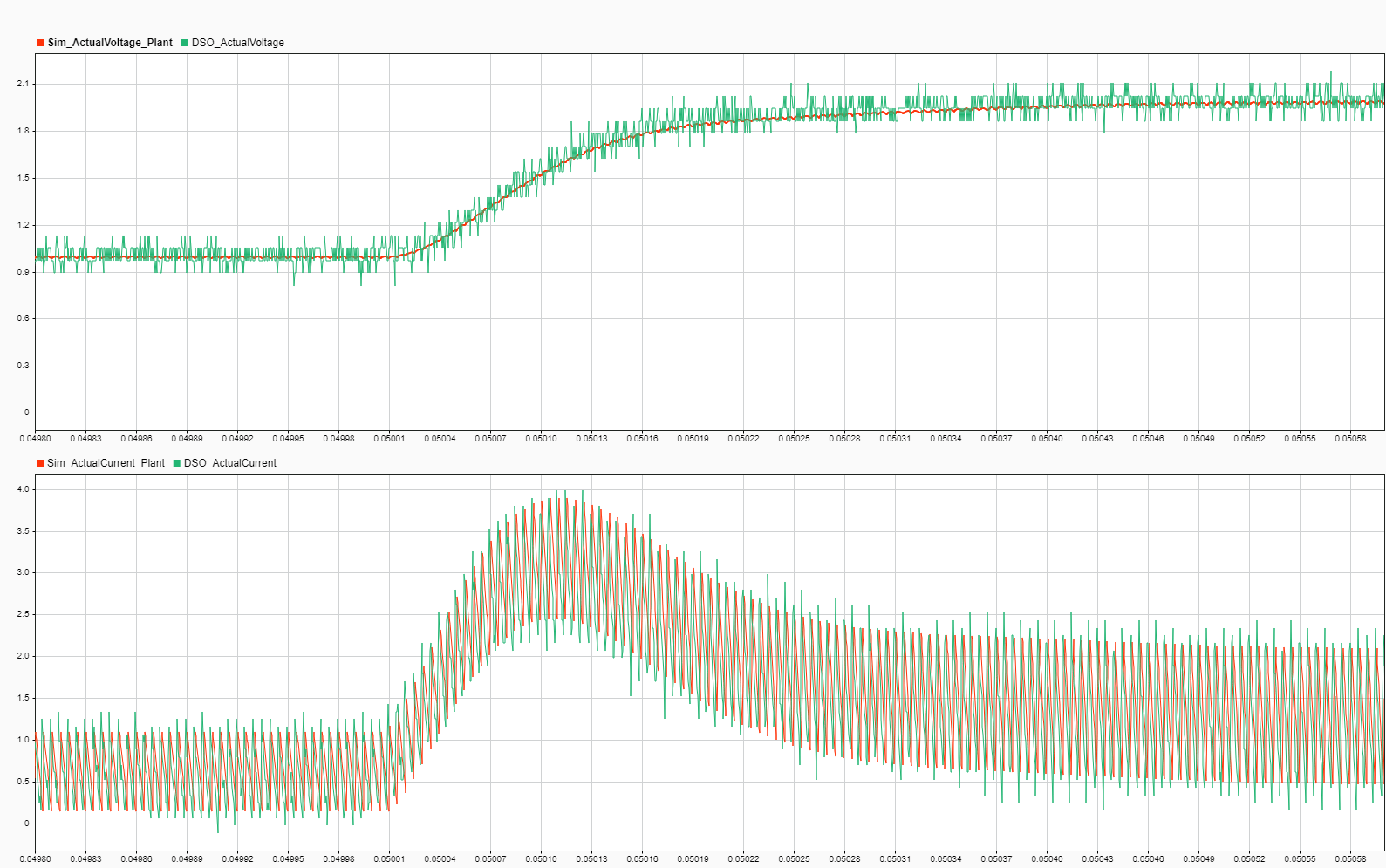
予想どおり、電圧モード コントローラーは目的の電圧出力を正しく追跡します。さらに、展開されたモデルからの測定値は、このタイプのシステムの場合、95% を超える精度でシミュレーションと一致します。シミュレーションと実際の測定値の間に見られるわずかな違いは、Simscape モデルで行われた単純化によるものと考えられます。
マルチコアを活用してCPU2にデータを記録する
CPU2 は、外部モードの SoC Builder ツールを実行し、CPU1 の制御ループによって生成された高周波信号をログに記録して送信するように構成されています。Interprocess Data Channel ブロックは CPU1 と CPU2 を接続し、CPU 間の低遅延データ転送を実現します。
SoC Builder ツールを使用して、モデルを TI Delfino F28379D LaunchPadにデプロイします。SoC Builderツールによって設定されたホストとターゲット間の通信接続は、ハードウェアボードの CPU2 で実行されている実行可能ファイルからの信号データを記録し、そのデータを Simulink の シミュレーション データ インスペクター に送信します。CPU2 を使用してホストとターゲット間の通信およびデータ ログを所有および管理することで、CPU1 上のリソースを大量に消費する高優先度タスクからデータをキャプチャできます。その際、タスクの動作が妨げられることなく、そのタスクが CPU リソースの大部分を消費することを防ぎ、Simulink へのデータ ログの品質を維持できます。この図は、TI Delfino F28379D LaunchPadに展開されたモデルの、CPU2 のタスク 2 でキャプチャされた、CPU1 のタスク 1 から記録されたデータ信号を示しています。
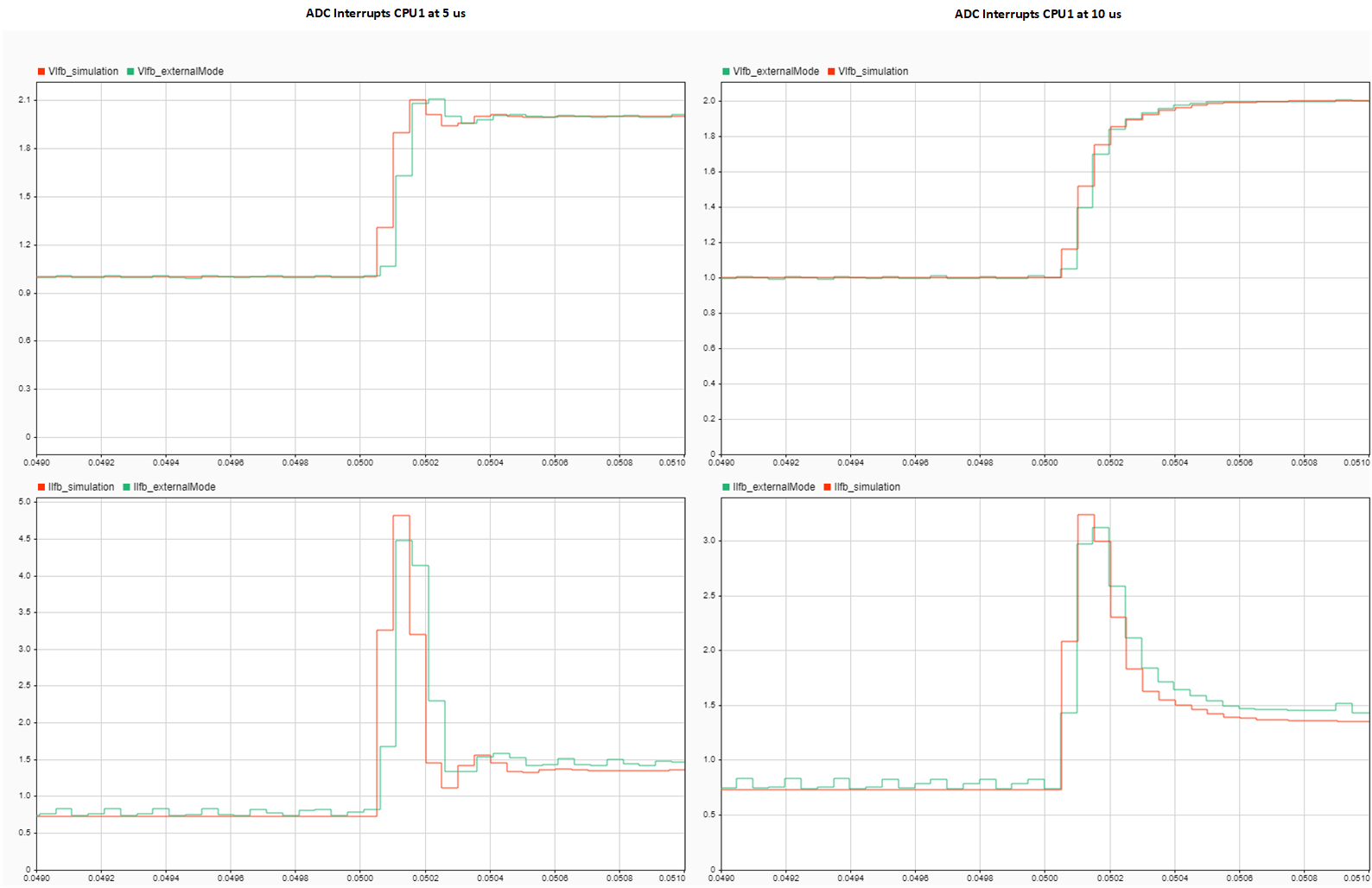
ADC変換開始トリガーは、1 番目の PWM イベントまたは 2 番目の PWM イベントで生成するように設定できます。これらの設定はシミュレーションとコード生成で使用できます。シミュレーションとコード生成の結果が 95% 以上の精度で一致することを確認します。
リソースを大量に消費する C2000 Blockset モデルは、モデルが TI Delfino F28379D LaunchPadに展開されるときに、このセットアップを使用してハードウェアからデータを記録できます。
さらなる探求
窒化ガリウム(GaN)または炭化ケイ素(SiC)を含む高周波スイッチングアプリケーション向けに拡張
可変PWM周波数と固定デューティサイクル
可変位相オフセット
PWM出力制御オプションを使用したさまざまなPWM出力方式
さまざまな PWM イベント生成技術