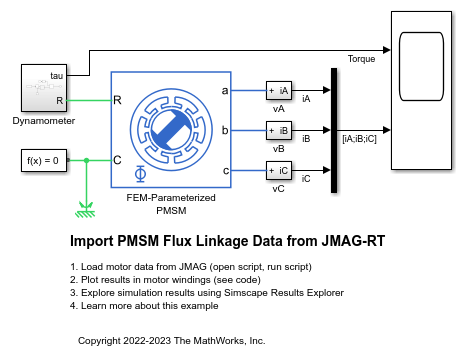
JMAG-RT からの PMSM 鎖交磁束データのインポート
この例では、モーター設計を JMAG®-RT から Simscape™ シミュレーションにインポートする方法を示します。
鎖交磁束データ
モーターの鎖交磁束とトルクを定義するデータ ファイルは、JSOL Corporation の許可を得て、JMAG-RT モデル データ ファイル 1k_S_C_IV.rtt から変換されてこの例に含まれています。JMAG-RT モデル データ ファイルは磁束とトルクのルックアップ テーブルで、JMAG-Designer を使用して計算されたものです。JMAG-RT Viewer (https://www.jmag-international.com/products/rt-viewer/) を使用して、JMAG-RT モデル データ ファイルを MATLAB® のバイナリ (*.mat) データ ファイルに変換できます。JMAG-RT Viewer から、この例のモーターの寸法、定格出力などの詳細にもアクセスできます。この例では、sschdladvisor による HDL コードの生成はサポートされていません。
モデルを開く
Simscape ログからのシミュレーション結果の表示
このプロットは、回転子の電気角が固定子の角度より 90 度先行しているときのシミュレーションによるモーターの電流とシャフトのトルクを示しています。トルクに、スロットと磁気飽和による高調波成分が含まれていることがわかります。

リアルタイム シミュレーションの結果
この例は、以下のプラットフォームでテストされました。
Intel® 3.5 GHz i7 マルチコア CPU と 4 GB の RAM を搭載した Speedgoat™ Performance リアルタイム ターゲット マシン。
3.5 GHz の Intel® Core XEON E3-1275v3 と 4 GB の RAM を搭載した dSPACE® SCALEXIO LabBox。
Simscape のローカル ソルバーを使用することで、このモデルを 70 マイクロ秒のステップ サイズでリアルタイム実行できます。サンプル レートが小さい場合、コールド キャッシュが原因で、最初のタスク実行中にタスク オーバーランが発生する可能性があります。このオーバーランを回避するには、選択したプラットフォームがこれらのオプションをサポートしている場合、タスク オーバーランの数を制限するか、リアルタイム アプリケーションの起動フェーズにおいてタスクのオーバーラン許容回数を制限するか、周期タスクのサンプル時間を延長することで、起動時の動作を緩和できます。