SM Governor with Droop
Synchronous machine governor with droop

Libraries:
Simscape /
Electrical /
Control /
SM Control
Description
The SM Governor with Droop block implements a synchronous machine (SM) governor with a droop characteristic. Use this block to regulate or control the throttle input to a prime mover driving a synchronous generator.
The block uses the error between the measured and desired generator speeds to set the prime mover throttle position. For example, when the prime mover is rotating too slowly, the throttle is opened to increase the energy input to the generator and increase its speed.
Operation
When multiple governor-driven generators are connected in parallel, droop characteristics ensure overall stability of the grid. Droop is defined as percent change in speed from no load to full load of the generator. This figure shows the speed-load relationship for a governor with 5% droop.
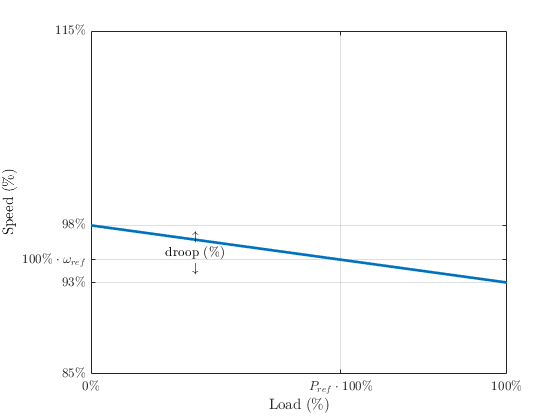
Here,
ωref is the reference speed of the governor. Set this value as a per-unit quantity using the speed_ref port.
Pref is the reference load of the governor. Set this value as a per-unit quantity using the P_ref port.
droopis the droop percentage of the governor. Set this value as a percentage using the Percentage droop, (%) parameter.
The block calculates the reference throttle position, expressed as a per-unit quantity, as:
where ω is the actual, per-unit generator speed.
The inertia of the valve introduces a delay between this reference throttle position and the actual throttle position, which is modeled as a first-order lag:
Here, Ts is the time constant. Set this value using the Time constant of governor, (s) parameter.
Examples

Three-Phase Synchronous Machine Governor Control Design
Script shows how you can linearize a Simscape™ Electrical™ model to support control system stability analysis and design. It uses example model SMGovernorDesign.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a