ユーザー独自のモーター駆動システムの作成
はじめに
以下では、Simulink® と Simscape™ Electrical™ Specialized Power Systems のブロックを使用してモーター ドライブのモデルを作成する方法を説明します。AC3 モデルによく似た、ベクトル制御モーター ドライブのモデルを作成します。次の図は、これから新たに作成するモーター ドライブのブロック線図を示します。
誘導モーターの可変周波数形のベクトル制御を表すモーター ドライブのブロック線図
誘導モーター ドライブの説明
誘導モーターは、三相交流の電流源として動作する電流制御形 PWM インバーターで駆動されます。モーター角速度 ω は、モーター回転数指令 ω* と比較し、それらの偏差 (ω*-ω) がなくなるように、速度コントローラーはトルク指令 Te* を出力します。
下記に示すように、回転子の三相交流電流 (ia、ib、ic) は、回転子鎖交磁束を基準に、これと同相の磁束発生に寄与する d 軸電流 ids と、これと直交するトルク発生に寄与する q 軸電流 iqs に分けて考えることで、磁束とトルクを別々に分けて制御することができます。
ベクトル制御の原理

固定子の q 軸電流 iqs* はトルク指令 Te* を使用して次式により計算されます。
ここで、Lr は回転子インダクタンス、Lm は相互インダクタンス、|ψr|est は次式で得られる回転子鎖交磁束です。
ここで、τr = Lr / Rr は回転子の時定数です。
固定子の d 軸電流指令 ids* は、回転子鎖交磁束の指令 |ψr|* から次式で得られます。
座標変換に必要な回転子磁束の位置 Θe は、回転子の角速度 ωm とすべり角周波数 ωsl から求めることができます。
このすべり角周波数は、固定子の電流指令 iqs* と誘導モーターの物理パラメーターから、次式で計算されます。
iqs* と ids* の d、q 軸電流指令は、電流制御器で利用するために、三相交流電流指令 ia*、ib*、ic* に変換されます。この電流制御器は、検出した三相交流電流 (ia、ib、ic) と三相交流電流指令 (ia*、ib*、ic*) の偏差に応じて、三相インバーター回路の 6 つのスイッチング素子の ON/OFF 状態を制御する適切なゲート信号を生成します。
速度コントローラーの役割は、定常状態においては、誘導モーター回転数が速度指令に一致するように、誘導モーター回転数を維持し、過渡状態においては、速度指令に対する誘導モーター回転数の応答性を高めることです。この例では、速度コントローラーは、比例-積分制御 (PI 制御) を適用します。
独自の誘導モーター ドライブのモデル作成
SimPowerSystems のサンプル モデル power_acdrive を開き、このサンプル ファイルを残した状態で変更作業ができるように、現在の作業ディレクトリに case3 と名前を変更してコピーしてください。
次の図は、Simscape Electrical Specialized Power Systems ライブラリと Simulink ライブラリのブロックを使用して誘導モーター ドライブをモデル化する、power_acdrive モデルを示しています。
AC モーター ドライブのベクトル制御 (power_acdrive)
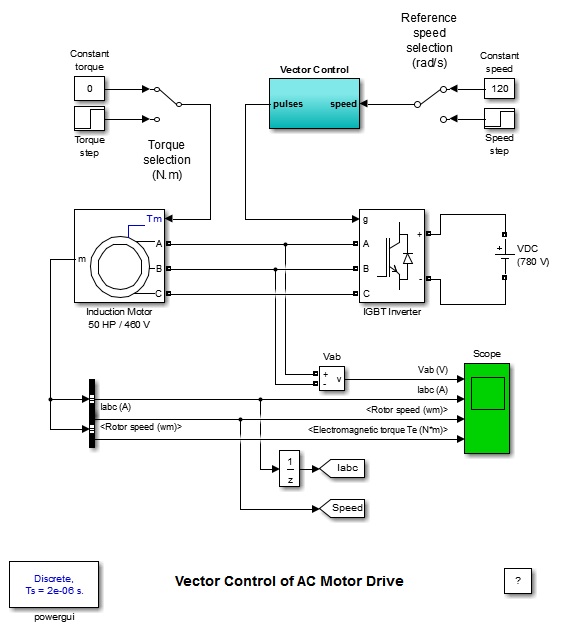
誘導モーターは、Asynchronous Machine ブロックを使用してモデル化されています。このサンプル モデルの誘導モーターは、50HP、460V、4 極、60Hz のモーターで次の物理パラメーターが設定されています。
Rs |
|
Lls |
|
Lm |
|
Rr |
|
Llr |
|
誘導モーターに適用する速度指令および負荷トルクは、どちらも Manual Switch ブロックで一定値にするかステップ関数にするかを選択できます。誘導モーターの速度指令の初期値は定数の 120rad/s に設定され、負荷トルクの初期値は定数の 0 N.m に設定されています。
ベクトル制御はAC モーター ドライブのベクトル制御 (power_acdrive)に示すように、Vector Control ブロックでモデル化されます。このブロックは、次の図に示すように Simulink ブロックで構成されています。
Vector Control ブロック

IGBT インバーターは、Universal Bridge ブロックでモデル化されますが、そこでは、[Power Electronic device] オプションと [Port configuration] オプションに、出力端子として [IGBT/Diode] と [ABC] がそれぞれ選択されています。IGBT 三相インバーター回路の入力電圧は、780V の直流電圧を供給します。
電流制御器は 3 つのヒステリシス コントローラーで構成され、Simulink ブロックで作成したものです。モーターの電流は、Asynchronous Machine ブロックの測定出力として提供されます。

abc 座標系と dq 座標系との座標変換は、abc_to_dq0 Transformation ブロックと dq0_to_abc Transformation (DQ_ABC) ブロックで行われます。
abc_dq
dq_abc

回転子鎖交磁束は、Flux_Calculation ブロックで計算されます。

回転子鎖交磁束の位置 θe は、Vector Control ブロックの Teta Calculation で計算します。モーター回転数は、Asynchronous Machine ブロックの測定出力として取得することができます。

固定子の q 軸電流指令 (iqs*) は、iqs*_Calculation ブロックで計算します。
固定子の d 軸電流指令 (ids*) は、id*_Calculation ブロックで計算します。

速度コントローラーは比例-積分制御 (PI 制御) で構成し、Simulink のブロックを使用してモデルを作成しています。

誘導モーターのシミュレーション
シミュレーション速度を高速化するために、このモデルはサンプル時間 2µs で離散化します。変数 Ts = 2e-6 は、このモデルを開くときに、自動的にワークスペースに読み込まれます。このサンプル時間 Ts は、電気回路 (Powergui ブロックにも Ts を設定済み) とコントローラー モデルの両方に使用されます。
シミュレーションを実行します。
モーターの角速度 ω (rad/s) とトルク Te (N.m) の他に、誘導モーターの電圧 Vab (V) と電流 Is_abc (A) の波形が、Scope ブロックに 4 つの応答波形 (Vab、labc、ωm、Te) として表示されます。
誘導モーターの起動時の応答波形
誘導モーターを表す Asynchronous Machine ブロックの初期条件として [1,0,0,0,0,0,0,0] (初期すべり = 1、三相交流の電流ゼロ) を指定することで、駆動を開始することができます。誘導モーターの速度指令は 120rad/s です。
誘導モーターのドライブの起動時における応答波形には、誘導モーターの角速度、トルク Te(N.m)、電流 (固定子の三相交流電流) is_abc (A) を示します。
最終的なシステムの状態ベクトルを保存して、それを後続のシミュレーションの初期状態として使用することにより、定常状態条件でシミュレーションを開始できることに注意してください。
誘導モーターのドライブの起動時における応答波形

誘導モーターの定常状態の応答波形
定常状態に達したとき、シミュレーションを停止し、Scope ブロックの信号を拡大してみてください。
以下の図は、誘導モーターが角速度 120rad/s、無負荷状態 (負荷トルク 0 [N.m]) で回転しているときの誘導モーターの電圧、電流、トルクの波形を示しています。
ヒステリシス コンパレーターで構成される電流制御器の影響で、誘導モーターの電流 is_abc (A) (固定子の三相交流電 ia、ib、ic) に 20A 幅で振動する電流成分があることが観測されます。
誘導モーターの定常状態における応答波形

誘導モーター ドライブの速応性の評価
誘導モーター ドライブの速応性は、誘導モーターの指令速度 (角速度) と負荷トルクのステップ応答をシミュレーションすることで評価することができます。速応性を評価する指標としては、誘導モーターの速度 (角速度) 指令や負荷トルク指令に対する応答性を表す立ち上がり時間、整定時間、ピーク応答、定常状態などがあります。
誘導モーターの角速度指令と負荷トルク指令の選択スイッチを使用して、それぞれ t = 0.2 秒で 120rad/s から 160rad/s に、t = 1.8 秒で 0N.m から 200N.m に変化させてください。以前のシミュレーションで得られた最終的なシステムの状態のベクトル xFinal は、シミュレーションが定常状態から開始するようにシステムの初期値として使用できます。変数 xInitial を作成する power_acdrive_init.mat ファイルを読み込みます。[シミュレーション] タブで、[モデル設定] をクリックします。[データのインポート/エクスポート] を選択します。[初期状態] を選択して [OK] をクリックします。再度、シミュレーションを実行してください。
誘導モーターの角速度指令と負荷トルク指令のステップ変化が続いて発生するときの、誘導モーターの応答が次の図のように観測できます。
誘導モーターのドライブの動特性

参考文献
[1] Leonhard, W., Control of Electrical Drives, Springer-Verlag, Berlin, 1996.
[2] Murphy, J. M. D., and Turnbull, F. G., Power Electronic Control of AC Motors, Pergamon Press, Oxford, 1985.
[3] Bose, B. K., Power Electronics and AC Drives, Prentice-Hall, Englewood Cliffs, N.J., 1986.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)