カスタム タイヤと複合滑りのインターフェイス - 上下動と回転をする車両
この例では、平面またはグリッド表面と車両のタイヤの間の接触をモデル化するために、Simscape™ Multibody™ の Custom Tire Force and Torque ブロックを Vehicle Dynamics Blockset™ の Combined Slip Wheel CPI ブロックとインターフェイスで接続する方法を示します。車両の操縦を行う表面は、Infinite Plane ブロックまたは Grid Surface ブロックを使用してモデル化します。運転者の入力を設定するために、いずれかの操作を選択します。
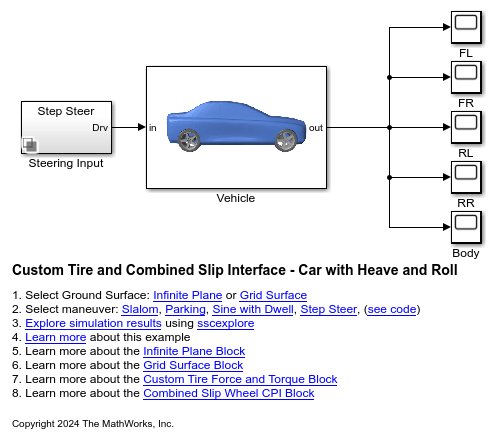
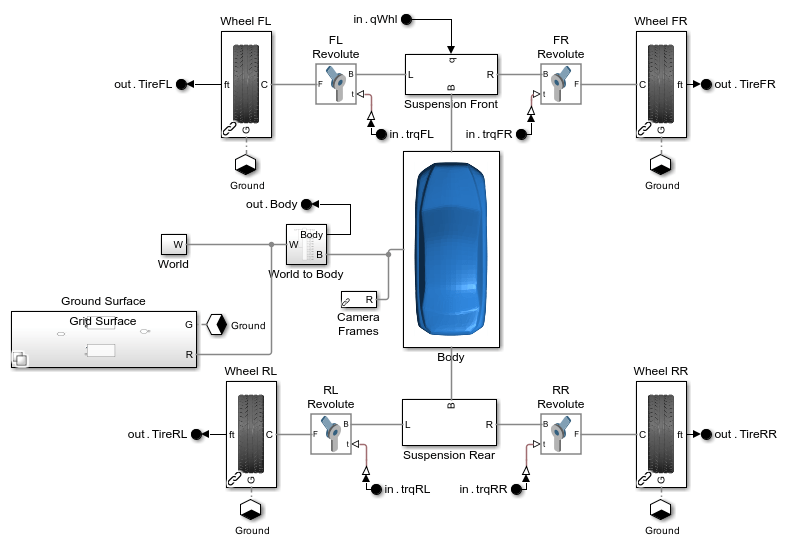
車両モデルには、6 自由度の車体モデル、それぞれが上下動と回転の自由度をもつ 2 本の車軸、および回転する 4 個の車輪が含まれます。前輪は、アッカーマンのステアリング方程式を使用してステアリングされます [1]。
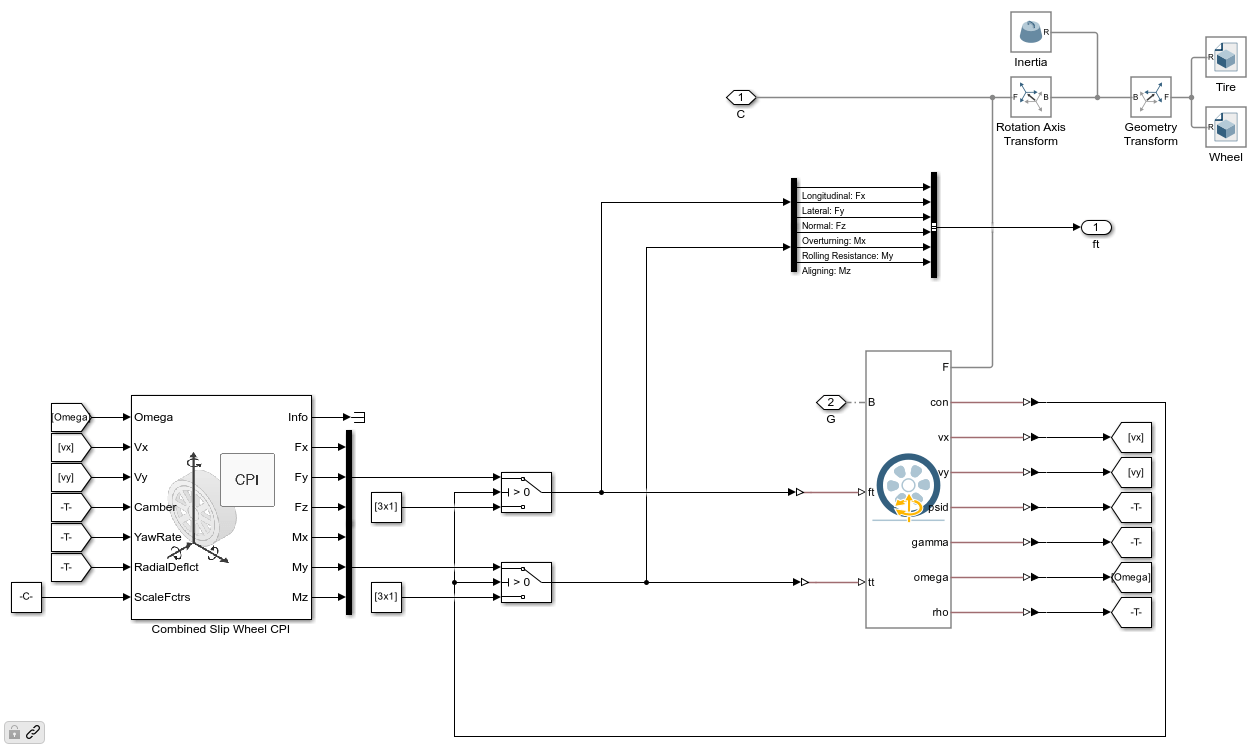
この例では、Custom Tire Force and Torque ブロックと Combined Slip Wheel CPI ブロックを使用して、タイヤを閉ループとしてモデル化します。Custom Tire Force and Torque ブロックは、タイヤと地面の間の相互作用および空間関係を計算し、出力を Combined Slip Wheel CPI ブロックに送ります。Combined Slip Wheel CPI ブロックは、タイヤの接触フレームを基準とするタイヤの力とトルクの値を計算し、それらの値が Custom Tire Force and Torque ブロックに入力としてループバックされます。
より多くのバッテリー式電気車両、ハイブリッド電気車両、および多軸車両のカスタマイズ可能なモデルについては、https://www.mathworks.com/matlabcentral/fileexchange/79484-simscape-vehicle-templates の Simscape Vehicle Templates を参照してください。
謝辞: MathWorks は、タイヤのパラメーターを含めてこの例に貢献してくださった M V Krishna Teja 博士 (インド工科大学マドラス校 Raghupati Singhania 研究拠点の Virtual Proving Ground and Simulation Lab) に感謝します。
参考文献:
[1] Jazar, R. N. (2008). Vehicle dynamics (Vol. 1). Berlin/Heidelberg, Germany: Springer.