自動車のサスペンション
この例では、前後独立垂直サスペンションを含む単純化した 1/2 車両システムのモデル化方法を示します。このモデルには、車体のピッチおよびバウンスの自由度も組み込まれています。この例では、乗り心地特性を調べるためにシミュレーションをどのように使用できるかを示すモデルについて説明します。このモデルをパワートレイン シミュレーションと共に使用して、スロットル設定の変更によって生じる縦方向の移動を調べることができます。
解析と物理学
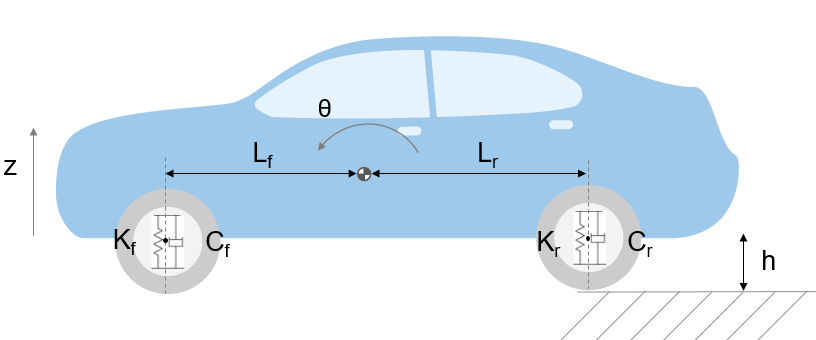
図は、1/2 車両のモデル化された特性を示しています。フロントおよびリア サスペンションは、バネ/ダンパー システムとしてモデル化されています。より詳細なモデルには、タイヤ モデルや、(圧縮時よりリバウンド時に減衰が大きくなる) 速度依存減衰などのダンパーの非線形性が含まれます。車体はピッチおよびバウンスの自由度をもち、モデル内で 4 つのステート、つまり、垂直変位、垂直速度、ピッチ角変位、ピッチ角速度で表されます。6 つの自由度をもつ完全なモデルを実装するには、ベクトル代数ブロックを使用して、軸変換と、力、変位、速度の計算を行います。
方程式 1 は、フロント サスペンションがバウンス (つまり、垂直の自由度) に与える影響を記述します。

ここで、







方程式 2 は、サスペンションによるピッチのモーメントを記述します。



ここで、

方程式 3 は、ニュートンの第 2 法則に従って、車体運動に生じる力とモーメントを解決します。


ここで、



モデル
モデルを開きます。
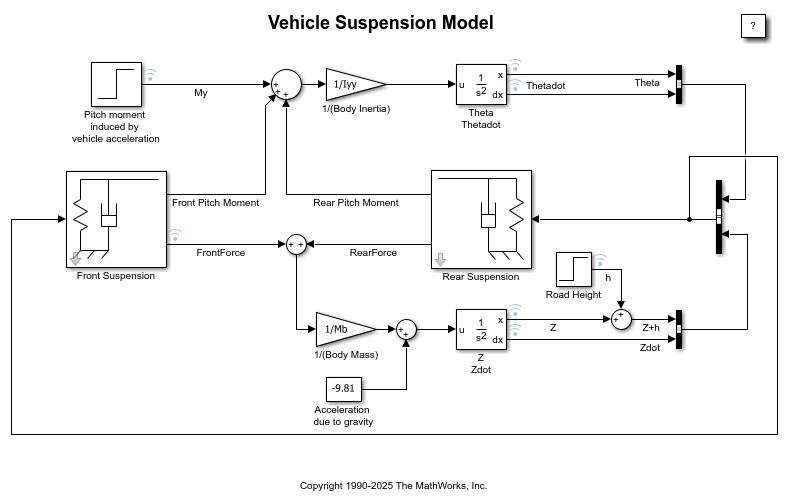
サスペンション モデルは 2 つの入力をもち、両方の入力ブロックがモデル ブロック線図上で青色で表示されています。最初の入力は道路高です。ここで入力されるステップは、高さが階段状に変化する路面を走行する車両に対応します。2 番目の入力は、ブレーキまたは加速操作によって生じる、車輪の中心を介して作用する水平力です。縦方向の車体運動はモデル化されていないため、この入力はピッチ軸の周りのモーメントとしてのみ表示されます。
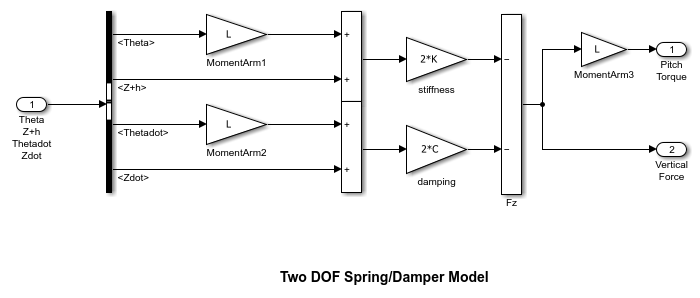
フロントおよびリア サスペンションをモデル化するバネ/ダンパー サブシステムを上図に示します。Front Suspension ブロックまたは Rear Suspension ブロックを右クリックします。[マスクの編集]、[マスク内を表示] を選択してフロント/リア サスペンション サブシステムを確認します。サスペンション サブシステムは、方程式 1-3 をモデル化します。Simulink® ブロック線図は、Gain ブロックおよび Summation ブロックを使用して方程式 1-3 を実装します。
フロントとリアの違いは次のように考慮されます。このサブシステムはマスク ブロックであるため、インスタンスごとに異なるデータセット (L、K および C) を入力できます。さらに、L は、直交座標 x と見なされ、原点または重心に対して負または正になります。したがって、Kf、Cf および -Lf がフロント サスペンション ブロックに使用されるのに対して、Kr、Cr および Lr がリア サスペンション ブロックに使用されます。
シミュレーションの実行
このモデルを実行するには、[シミュレーション] タブで [実行] をクリックします。初期条件が sldemo_suspdat.m ファイルからモデル ワークスペースに読み込まれます。モデル ワークスペースの内容を確認するには、Simulink エディターの [モデル化] タブで、[設計] から [モデル エクスプローラー] を選択します。モデル エクスプローラーで、sldemo_suspn モデルの内容の下で [モデル ワークスペース] を選択します。モデル ワークスペースに初期条件を読み込むことで、パラメーターを誤って変更するのを防ぎ、MATLAB ワークスペースをクリーンな状態に保つことができます。
このモデルは、MATLAB ワークスペースの sldemo_suspn_output というデータ構造に関連データのログを作成します。構造の名前を入力して、どのようなデータが含まれているかを確認します。
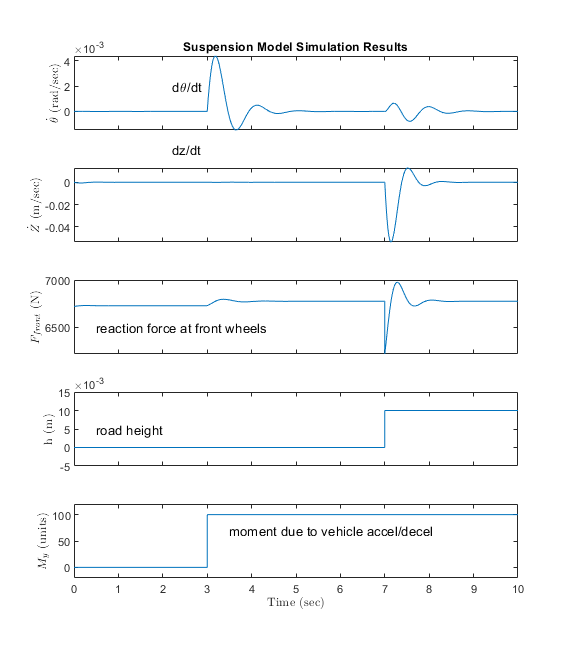
シミュレーション結果が上に表示されています。結果は、sldemo_suspgraph.m ファイルによってプロットされます。既定の初期条件については、表 1 を参照してください。
表 1: 既定の初期条件
Lf = 0.9; % front hub displacement from body gravity center (m) Lr = 1.2; % rear hub displacement from body gravity center (m) Mb = 1200; % body mass (kg) Iyy = 2100; % body moment of inertia about y-axis (kg m^2) kf = 28000; % front suspension stiffness (N/m) kr = 21000; % rear suspension stiffness (N/m) cf = 2500; % front suspension damping (N sec/m) cr = 2000; % rear suspension damping (N sec/m)
このモデルでは、サスペンションの減衰と剛性を変更する影響をシミュレートし、それにより、乗り心地と性能間のトレードオフを調べることができます。一般に、レーシング カーはバネ剛性が非常に高く、減衰係数が高いのに対して、乗用車のバネはより柔らかく、振動応答性がより高くなります。