Ideal Translational Motion Sensor
機械並進システムの運動センサー

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
説明
Ideal Translational Motion Sensor ブロックは、2 つの機械並進ノード間で測定されたアクロス変数を、加速度、速度、または位置に比例する制御信号に変換するデバイスを表します。初期位置 (オフセット) をブロック パラメーターとして指定できます。
このセンサーは、慣性、摩擦、遅延、エネルギー消費量などを考慮しない理想的なものです。
接続 R と接続 C は、運動を監視するノードにブロックを接続する機械並進保存端子です。このブロックの正方向は端子 R から端子 C です。つまり、速度は v = vR – vC として測定されます。ここで、vR と vC はそれぞれ端子 R と端子 C の絶対速度です。[測定基準] パラメーターを使用すると、端子 C を無効にして接地を基準に測定できます。
接続 A、V、および P はそれぞれ加速度、速度、および位置の物理量信号出力端子です。これらの端子の表示はブロック パラメーターによって制御されます。端子 A を有効にすると、ブロックによって追加の計算が行われ、速度に基づいて加速度が測定されます。モデルが不必要に複雑化するのを防ぐために、ブロックの各インスタンスで、実際に測定に使用する端子のみを有効にすることをお勧めします。
例
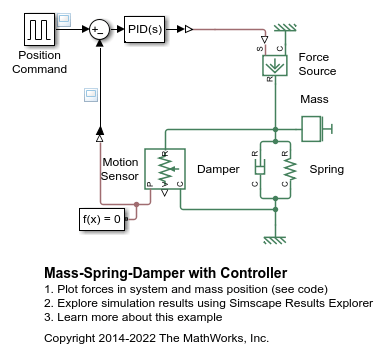
コントローラーを使用するマス-バネ-ダンパー
この例では、制御されたマス-バネ-ダンパーを示します。コントローラーで質量にかかる力を調整し、質量の位置によってコマンド信号を追跡できるようにします。質量の初期速度は、秒速 10 メートルです。コントローラーは Force Source によって適用された力を調整して、入力信号へのステップ変化を追跡します。

リンク機構
この例では、リンク機構での Simscape™ Lever ブロックの使用方法を説明します。Lever 1 と Lever 4 は第 1 種てこであり、終端に支点があります。Lever 3 は第 2 種てこであり、中央に支点があります。Lever 2 は、1 番目と 3 番目のてこによって駆動される加算てこです。

並進ハード ストップを使用する機械システム
この例では、ハード ストップで接続された 2 つの質量について説明します。Mass 1 は理想的な速度源によって駆動されています。速度入力の方向の変化に伴い、Mass 2 は、Mass 1 が Transitional Hard Stop によってモデル化されたバックラッシュのもう一方の端に達するまで静止します。Mass 2 の変位を Mass 1 の変位に対してプロットすると、典型的なヒステリシス曲線が生成されます。