Ideal Rotational Motion Sensor
機械的回転システムの運動センサー

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Mechanical Sensors
説明
Ideal Rotational Motion Sensor ブロックは、理想的な機械回転運動センサー、つまり 2 つの機械回転ノード間で測定されたアクロス変数を、加速度、角速度、または位置 (角度) に比例する制御信号に変換するデバイスを表します。初期角度位置 (オフセット) をブロック パラメーターとして指定できます。
このセンサーは、慣性、摩擦、遅延、エネルギー消費量などを考慮しない理想的なものです。
接続 R と接続 C は、運動を監視するノードにブロックを接続する機械回転保存端子です。このブロックの正方向は端子 R から端子 C です。つまり、速度は ω = ωR – ωC として測定されます。ここで、ωR と ωC はそれぞれ端子 R と端子 C の絶対角速度です。[測定基準] パラメーターを使用すると、端子 C を無効にして接地を基準に測定できます。
接続 α、W、および A はそれぞれ角加速度、角速度、角変位の物理量信号出力端子です。これらの端子の表示はブロック パラメーターによって制御されます。端子 α を有効にすると、ブロックによって追加の計算が行われ、速度に基づいて加速度が測定されます。モデルが不必要に複雑化するのを防ぐために、ブロックの各インスタンスで、実際に測定に使用する端子のみを有効にすることをお勧めします。
[角度を [0, 2*pi] にラップ] チェック ボックスを使用すると、角変位の出力範囲を制御できます。オンにすると、角変位は、オブジェクトによって実行される回転数と回転の方向に関係なく、0 ~ 2π ラジアン (360 度) の範囲内に維持されます。このチェック ボックスをオフにすると、出力範囲は制限されません。
次の図は、2 つのオプションの違いを示しています。
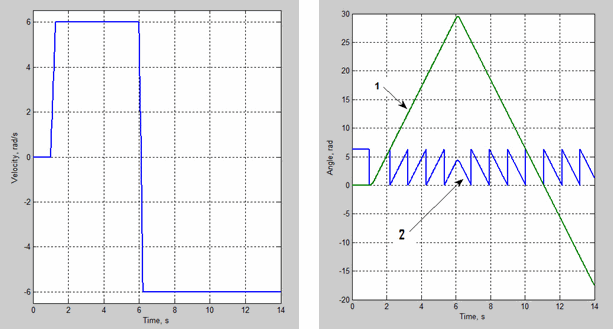
この例のオブジェクトは、最初の 5 秒間は正方向に 6 rad/s で移動し、その後負方向に切り替わって同じ速度で移動します。既定の角変位出力 (ライン 1) は、オブジェクトが 30 rad 進んだ後、負方向に –20 rad まで戻り続けたことを示しています。[角度を [0, 2*pi] にラップ] チェック ボックスをオンにした場合、出力 (ライン 2) は 0 ~ 2π rad の範囲に留まります。
[角度を [0, 2*pi] にラップ] チェック ボックスをオンにすると、モデル パラメーターと回転角度の関係が複雑なモデル (ポンプやモーターなど) の開発が単純化されます。
例

永久磁石 DC モーター
この例では、テスト ハーネスおよび Simscape™ ブロックを使用して、DC モーターの無負荷速度、無負荷電流、および停動トルクのメーカー仕様を検証する方法を示します。

スティックスリップ運動を伴う機械的回転システム
このモデルでは、スティックスリップ摩擦を伴う機械的回転システムについて説明します。慣性は、バネとダンパーによって、固定点に接続されます。慣性は速度源によって、スティックスリップ摩擦素子を介して駆動されます。摩擦素子では、起動摩擦とクーロン摩擦の間に差があるため、慣性のスティックスリップ運動が発生します。