Logic-Controlled Clutch
Friction clutch with input control

Libraries:
Simscape /
Driveline /
Clutches
Description
The Logic-Controlled Clutch represents a logic-controlled mechanism that transmits rotational power through friction. The block is an advanced version of the Fundamental Friction Clutch block. You control the Logic-Controlled Clutch block with physical signal at port E.
If the clutch is engaging and in motion, the block applies the kinetic torque. If the clutch is engaging and not in motion, the block applies the static torque.
Examples
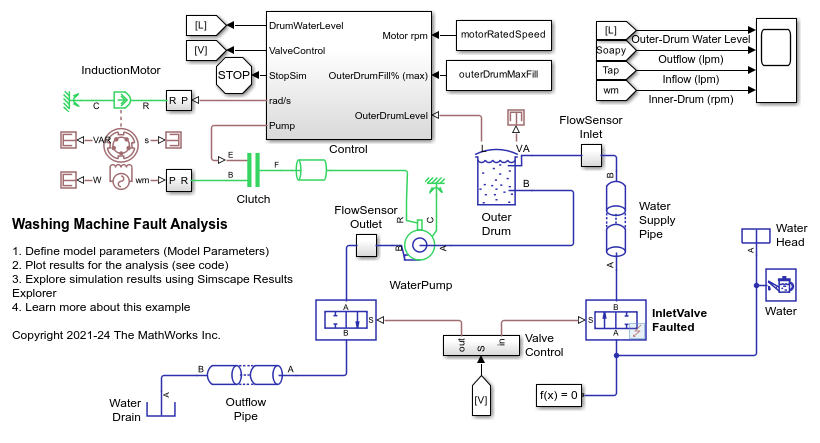
Washing Machine Fault Analysis
Model a washing machine and introduce a fault in its operation. The machine water supply faults at a specific time and this example models the system response under this scenario. The electric motor switches off and the machine operation is aborted by discharging the partially filled outer drum.
Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2016b
See Also
Cone Clutch | Disc Friction Clutch | Dog Clutch | Fundamental Friction Clutch