Set Up URSim Offline Simulator for ROS 2
Universal Robots provides a software emulator URSim, to test and validate motion planning and control algorithms using offline programming and simulation of robot programs. For more information on the features and limitations of URSim, refer to this webpage .
Configure URSim
URSim is an offline simulator by Universal Robots. The functionality of URSim is
almost identically to a real cobot connected over the network. This workflow focuses on
setting up the Docker for URSim. The external control and network setup are configured
by Universal Robots and included as a script in the ur_client_library
package.
To launch URSim from the Docker®:
Source the ROS 2 Humble from Linux® terminal
source /opt/ros/humble/setup.bash
Run this script to launch URSim.
ros2 run ur_client_library start_ursim.sh
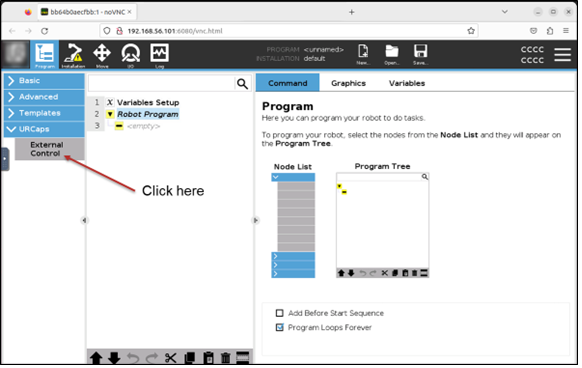
After URSim is launched, go to Program tab, and click URCaps > External Control to add the External Control URCap (which is already available in the package).
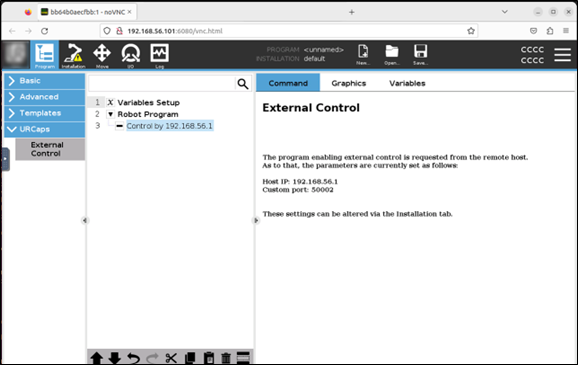
Verify the successful addition of the External Control URCap, which gets listed under the Robot Program node.
Troubleshooting URSim
If the URSim is not available in VNC browser, try these steps:
Refresh the browser tab where it is running.
If the issue still persists, kill the existing docker running in Linux terminal and relaunch URSim using this command:
$ ros2 run ur_client_library start_ursim.sh