大規模な制約付き線形最小二乗法、問題ベース
この例では、大規模な範囲制約付き線形最小二乗最適化問題を解いて、不鮮明なイメージを修正する方法を説明します。この例では、問題ベースのアプローチを使用します。ソルバーベースのアプローチについては、大規模な制約付き線形最小二乗法、ソルバーベースを参照してください。
問題
興味深いナンバー プレートの自動車に乗っている人物の写真があります。
load optdeblur [m,n] = size(P); mn = m*n; figure imshow(P); colormap(gray); axis off image; title([string(m) + " x " + string(n) + " (" + string(mn) + ") pixels"])

問題は、この写真にブレを追加してからブレを除去しようとすることです。最初のイメージは白黒であり、m 行 n 列の行列 P 内の 0 から 1 の範囲にあるピクセル値から構成されています。
動きの追加
各ピクセルと上下 5 ピクセルの平均をとることによって、垂直方向の動きのブレの影響をシミュレートします。単一の行列乗算でブレを追加するためのスパース行列 D を作成します。
blur = 5; mindex = 1:mn; nindex = 1:mn; for i = 1:blur mindex=[mindex i+1:mn 1:mn-i]; nindex=[nindex 1:mn-i i+1:mn]; end D = sparse(mindex,nindex,1/(2*blur+1));
D の図を描画します。
cla axis off ij xs = 31; ys = 15; xlim([0,xs+1]); ylim([0,ys+1]); [ix,iy] = meshgrid(1:(xs-1),1:(ys-1)); l = abs(ix-iy) <= blur; text(ix(l),iy(l),"x") text(ix(~l),iy(~l),"0") text(xs*ones(ys,1),1:ys,"..."); text(1:xs,ys*ones(xs,1),"..."); title("Blurring Operator D (x = 1/11)")

イメージ P に行列 D を乗算して、ブレを追加したイメージ G を作成します。
G = D*(P(:)); figure imshow(reshape(G,m,n));

イメージは判別が困難になり、ナンバー プレートを読むことができなくなりました。
ブレを除去したイメージ
ブレを除去するため、ブレを追加する演算子 D が既知であると仮定します。どの程度、ブレを除去して、元のイメージ P を復元できるでしょうか。
最も簡単な方法は、次の最小二乗問題を x について解くことです。
という条件で
この問題では、与えられたブレ追加行列 D を使用して、Dx が G = DP に最も近くなる x を求めようとします。解が妥当なピクセル値を表すように、解を 0 から 1 に制限します。
x = optimvar("x",mn,LowerBound=0,UpperBound=1);
expr = D*x-G;
objec = expr'*expr;
blurprob = optimproblem(Objective=objec);
sol = solve(blurprob);Solving problem using quadprog. Minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
xpic = reshape(sol.x,m,n);
figure
imshow(xpic)
title("Deblurred Image")
ブレを除去したイメージは、ブレを追加したイメージよりはるかに鮮明になっています。再び、ナンバー プレートを読むことができるようになりました。しかし、ブレを除去したイメージには、右下の舗道の部分にある水平の帯のような不自然さがあります。おそらく、これらの不自然さは、正則化によって除去できます。
正則化
正則化は、解を平滑化する方法です。正則化の方法は多数あります。簡単なアプローチとして、次のように目的関数に項を追加します。
という条件で
という項は、生成される二次問題をより安定させます。 を使用して、再び問題を解きます。
addI = speye(mn); expr2 = (D + 0.02*addI)*x - G; objec2 = expr2'*expr2; blurprob2 = optimproblem(Objective=objec2); sol2 = solve(blurprob2);
Solving problem using quadprog. Minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
xpic2 = reshape(sol2.x,m,n);
figure
imshow(xpic2)
title("Deblurred Regularized Image")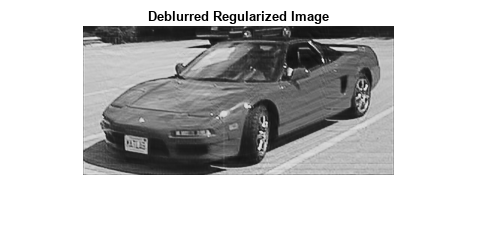
この簡単な正則化では、不自然さが除去されないようです。