derivative
説明
stateDot = derivative(kinematicModel,state,cmds)kinematicModel について、現在の状態微分 stateDot を 3 要素ベクトル [xDot yDot thetaDot] として返します。xDot および yDot はメートル/秒単位で指定されるビークルの速度を参照します。thetaDot はラジアン/秒単位で指定されるビークルの向きの角速度です。
例
ロボットを作成し、初期の開始位置および向きを設定します。
kinematicModel = bicycleKinematics; initialState = [0 0 0];
シミュレーションの時間範囲を 0.05 秒のタイム ステップで 1 秒に設定し、入力コマンドでビークル速度を 2 m/s、ステアリング角度を pi/4 ラジアンに設定して、左折を作成します。ode45ソルバーを関数 derivative で使用することにより、ロボットの動作をシミュレーションします。
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
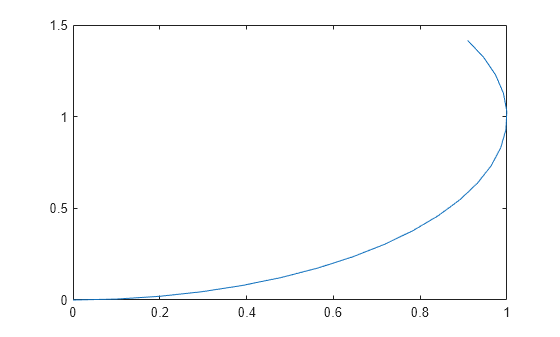
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);パスをプロットします。
figure plot(y(:,1),y(:,2))
入力引数
出力引数
参照
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. 1st ed. Cambridge, MA: Cambridge University Press, 2017.
拡張機能
バージョン履歴
R2021b で導入