このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
誘導モーター
これらの参照例は、誘導モーター用のセンサーベースおよびセンサーレスのモーター制御アルゴリズムの実装に使用します。
注目の例
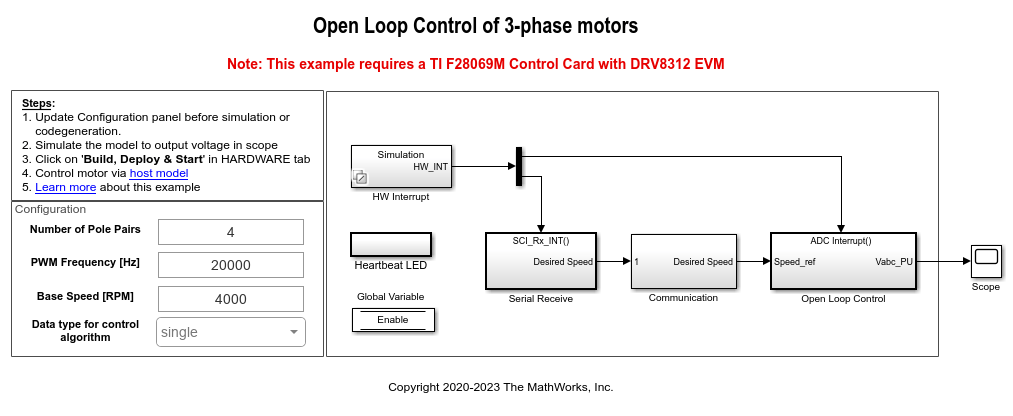
開ループ制御での三相 AC モーターの駆動と ADC オフセットのキャリブレーション
この例では、開ループ制御 (スカラー制御またはボルト/ヘルツ制御とも呼ばれる) を使用してモーターを駆動します。この手法では、モーターからのいずれのフィードバックも使用せずに、固定子電圧と周波数を変えて回転子速度を制御します。この手法を使用してハードウェア接続の整合性を確認できます。開ループ制御の一定速度のアプリケーションでは、固定周波数のモーター電源を使用します。開ループ制御の可変速度のアプリケーションでは、回転子速度を制御するために可変周波数の電源が必要です。固定子の磁束を一定に保つために、電源電圧の振幅がその周波数と比例するように維持します。
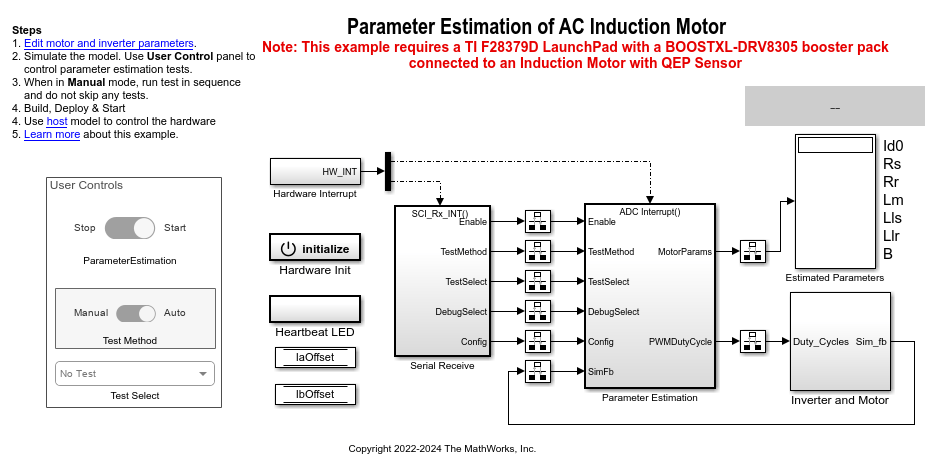
Estimate Induction Motor Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of an AC induction motor (ACIM):
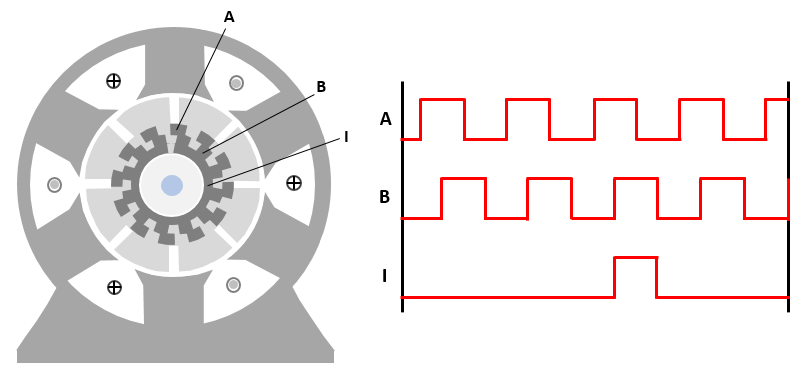
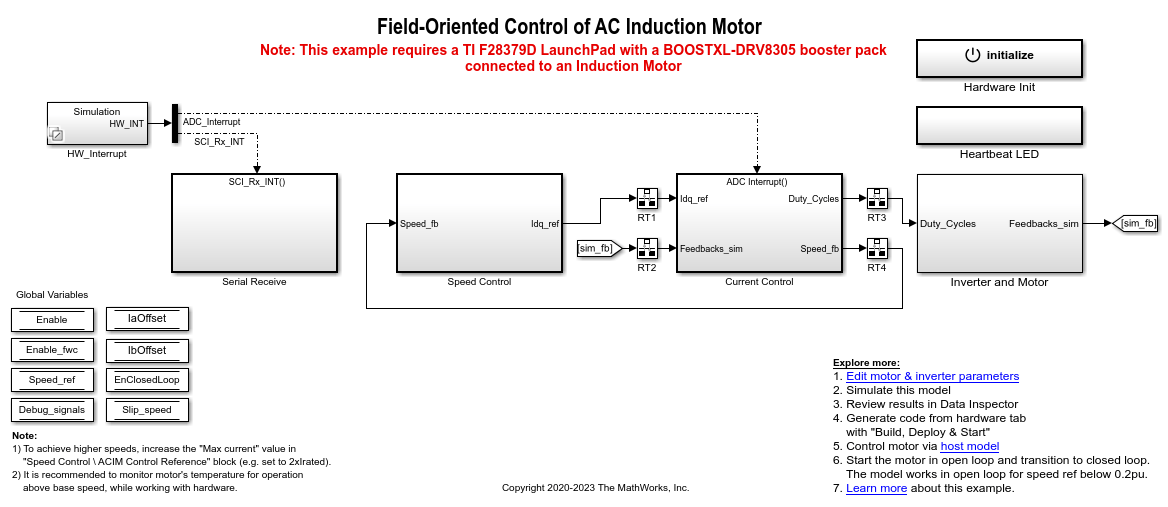
速度センサーを使用した誘導モーターのベクトル制御
この例では、三相交流誘導モーター (ACIM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。この FOC アルゴリズムには回転子の速度フィードバックが必要であり、この例ではそれを直交エンコーダー センサーを使用して取得します。FOC の詳細については、ベクトル制御 (FOC)を参照してください。
誘導モーターのセンサーレス ベクトル制御
この例では、センサーレス位置推定を使用して、三相交流誘導モーター (ACIM) の角速度を制御するためのベクトル制御 (FOC) 手法を実装します。FOC の詳細については、ベクトル制御 (FOC)を参照してください。