odeEvent
Description
odeEvent objects define events that the solver detects while
solving an ordinary differential equation. An event occurs when one of the event functions you
specify crosses zero. You can specify the type of zero crossings to detect and what actions
should be performed when an event occurs, including the use of a custom callback function. For
example, you can use event functions to detect when an object hits the ground or when a planet
completes an orbit.
Create an ode object to
represent the ODE problem, and specify an odeEvent object as the value of the
EventDefinition property to incorporate event detection into the
problem.
Creation
Description
E = odeEventodeEvent object with empty properties.
E = odeEvent(PropertyName=Value)E
= odeEvent(Direction="ascending") defines an event for ascending zero
crossings.
Properties
Event function, specified as a function handle. The event function defines one or
more expressions based on the current values of the solution (t,y),
(t,y,yp) when EquationType is
"fullyimplicit", or (t,y,Z) or
(t,y,ydel,ypdel) when EquationType is
"delay" from the solver. The output of the event function can be a
scalar (to detect a single event) or a vector (to detect multiple events). An event
occurs when the value of one or more of the outputs from the event function crosses
zero.
The event function must accept two input arguments for (t,y),
such as v = myEvents(t,y), three input arguments for
(t,y,yp), such as v = myEvents(t,y,yp), and
(t,y,Z), such as v = myEvents(t,y,Z), or four
input arguments for (t,y,ydel,ypdel), such as v =
myEvents(t,y,ydel,ypdel). If the Parameters property of
the ode object includes parameters to pass to the event function, then
the event function also can accept three, four, or five input arguments to receive the
parameter values, v = myEvents(t,y,p), v =
myEvents(t,y,yp,p), v = myEvents(t,y,Z,p), or v
= myEvents(t,y,ydel,ypdel,p).
For example, this event function detects events whenever one of the two solution components of an ODE crosses zero.
function v = myEvents(t,y) v(1) = y(1); v(2) = y(2); end
Use the Direction property to specify the type of zero
crossings to detect. Use the Response property to define how the
solver should respond when an event is triggered.
Example:
E.EventFcn = @(t,y) y(1) defines an event function that triggers an
event whenever the first component of the solution y(1) crosses
zero.
Example:
E.EventFcn = @myEvents specifies a handle to a function containing
the events to detect.
Data Types: function_handle
Direction of zero crossings to detect, specified as a scalar or vector of the values
in the table. If you specify a vector of values, then the length of the vector must
equal the number of elements in the output from EventFcn.
| Value | Description | Example Events |
|---|---|---|
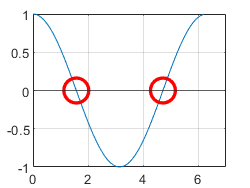
"both" | All zero crossings of the event function are detected. |
|
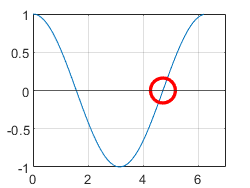
"ascending" | Zero crossings where the event function has a positive slope (integrating forward in time) are detected. |
|
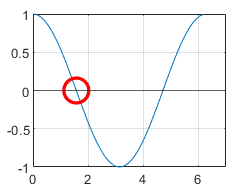
"descending" | Zero crossings where the event function has a negative slope (integrating forward in time) are detected. |
|
Example:
E.Direction = "both" detects all zero crossings of the event
function.
Example: Integrating forward in time, E.Direction = "ascending"
detects only zero crossings where the event function is increasing.
Example:
E.Direction = ["both" "ascending" "descending"] specifies different
zero-crossing directions to detect for each of three outputs from
EventFcn.
Solver response to triggered events, specified as a scalar or vector of the values
in the table. If you specify a vector of values, then the length of the vector must
equal the number of elements in the output from EventFcn.
| Value | Description |
|---|---|
"proceed" | The solver logs the event and continues integrating. |
"stop" | The solver logs the event and stops the integration. |
"callback" | The solver invokes a callback function before logging the event. The
function can return up to three outputs to indicate whether to continue or stop
the integration, a new value for ye (the solution at the time
of the event), or new Parameters to use when restarting the
integration from time te (the time of the event). Define the
callback function using the CallbackFcn property. |
Example:
E.Response = "stop" stops the integration if an event is
detected.
Example: E.Response = ["proceed" "stop" "callback"] specifies
different responses to triggered events for each of three outputs from
EventFcn.
Callback function, specified as a function handle. The ODE solver invokes
CallbackFcn whenever an event triggers for which the value of
Response is "callback".
The callback function can accept up to four inputs and return up to three outputs, but it does not need to accept all of the inputs or supply all of the outputs.
[stop,ye,Parameters] = eventCallback(te,ye,ie,Parameters)
When an event triggers for which the value of Response is
"callback", the solver invokes the callback function and supplies
information about the current state of the integration as inputs to the callback
function:
teis the scalar time when the event triggered.yeis the solution vector at the time of the event.ieis the index of the event that triggered, and can be a vector if multiple events trigger at the same time.The
Parametersinput is the current value ofParameterssupplied toODEFcn(or any other function that accepts the parameters). Unless it is the first callback event, then the current value ofParametersmight not be the same as theParametersproperty of theodeobject. The difference arises because the callback function can change the value ofParametersas events trigger during the integration process.
The callback function can return up to three outputs:
stopmust be a logical value.If
stopistrue, then the integration stops at timete.If
stopisfalse, then the integration restarts from timeteand proceeds. UseF.SolverOptions.InitialStepto control the size of the initial step when the integration restarts.
yeis the new value of the solution vector at timete. Use this output to modify the value ofyesupplied to the callback function as an input. This output is useful for modeling discontinuities at unknown points. This change is local to the currently running integration and does not affect the storedInitialTimeandInitialValueproperties of theodeobject.Parametersis the new value ofParameterssupplied toODEFcn(or any other function that accepts the parameters). Use this output to modify the value ofParameterssupplied to the callback function as an input. Ifstopisfalseand the integration restarts from timete, then the new value ofParametersis supplied to all functions that accept it. This change is local to the currently running integration and does not affect theParametersproperty of theodeobject.
Example:
E.CallbackFcn = @eventCallback specifies a handle to a function named
eventCallback as the callback function.
Data Types: function_handle
Examples
Consider a ball thrown upward with an initial velocity . The ball is subject to acceleration due to gravity aimed downward, so its acceleration is
Rewriting the equation as a first-order system of equations with the substitutions and yields
Solve the equations for the position and velocity of the ball over time.
Define Equations and Initial Conditions
Create a function handle for the first-order system of equations that accepts two inputs for (t,y). Use the value for the acceleration due to gravity.
dydt = @(t,y) [y(2); -9.8];
Next, create a vector with the initial conditions. The ball starts at position at as it is thrown upward with initial velocity .
y0 = [3 20];
Model Ball Bounces as Events
The ball initially travels upward until the force due to gravity causes it to change direction and head back down to the ground. If you solve the equations without more consideration, then the ball falls back downward forever without striking the ground. Instead, you can use an event function to detect when the position of the ball goes to zero where the ground is located. Because the solution component is the position of the ball, the event function tracks the value of so that an event triggers whenever .
Create a function handle for the event function that accepts two inputs for (t,y).
bounceEvent = @(t,y) y(1);
When the ball strikes the ground, its direction changes again as it heads back upwards with a new (smaller) initial velocity. To model this situation, use a callback function along with the event function. When an event triggers, the ODE solver invokes the callback function. The callback function resets the position and initial velocity of the ball so that the integration can restart with the correct initial conditions. When an event occurs, the callback function sets the position and attenuates the velocity by a factor of while reversing its direction back upward. Define a callback function that performs these actions.
function [stop,y] = bounceResponse(t,y) stop = false; y(1) = 0; y(2) = -0.9*y(2); end
(The callback function is included as a local function at the end of the example.)
Create an odeEvent object to represent the bouncing ball events. Specify Direction="descending" so that only events where the position is decreasing are detected. Also, specify Response="callback" so that the solver invokes the callback function when an event occurs.
E = odeEvent(EventFcn=bounceEvent, ... Direction="descending", ... Response="callback", ... CallbackFcn=@bounceResponse)
E =
odeEvent with properties:
EventFcn: @(t,y)y(1)
Direction: descending
Response: callback
CallbackFcn: @bounceResponse
Solve Equations
Create an ode object for the problem, specifying the equations dydt, initial conditions y0, and events E as property values.
F = ode(ODEFcn=dydt,InitialValue=y0,EventDefinition=E);
Integrate the equations over the time interval [0 30] by using the solve method. Specify Refine=8 to generate 8 points per step. The resulting object has properties for the time and solution, and because events are being tracked, the object also displays properties related to the events that triggered during the integration.
S = solve(F,0,30,Refine=8)
S =
ODEResults with properties:
Time: [0 0.0038 0.0075 0.0113 0.0151 0.0188 0.0226 0.0264 0.0301 0.0490 0.0678 0.0867 0.1055 0.1243 0.1432 0.1620 0.1809 0.2751 0.3692 0.4634 0.5576 0.6518 0.7460 0.8402 0.9344 1.3094 1.6844 2.0594 2.4344 2.8094 3.1844 … ] (1×468 double)
Solution: [2×468 double]
EventTime: [4.2265 8.1607 11.7015 14.8882 17.7563 20.3375 22.6606 24.7514 26.6331 28.3267 29.8509]
EventSolution: [2×11 double]
EventIndex: [1 1 1 1 1 1 1 1 1 1 1]
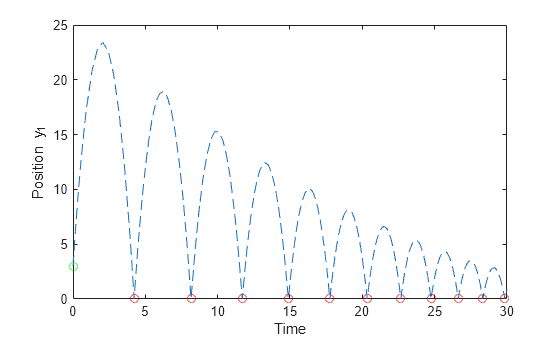
Plot Results
Plot the position of the ball over time, marking the initial position with a green circle and events with red circles.
plot(S.Time,S.Solution(1,:),"--") hold on plot(S.EventTime,S.EventSolution(1,:),"ro") plot(0,y0(1),"go") hold off ylim([0 25]) xlabel("Time") ylabel("Position y_1")
Local Functions
function [stop,y] = bounceResponse(t,y) stop = false; y(1) = 0; y(2) = -0.9*y(2); end
Version History
Introduced in R2023bSee Also
ode | odeMassMatrix | odeJacobian | ODEResults | odeset