ラドン変換を使用したラインの検出
この例では、ラドン変換を使用してイメージ内のラインを検出する方法を説明します。ラドン変換は、ハフ変換として知られている一般的なコンピューター ビジョン演算と密接に関連しています。関数 radon を使用して、直線を検出するために使われるハフ変換を実行できます。
イメージのラドン変換の計算
イメージをワークスペースに読み取ります。それをグレースケール イメージに変換します。
I = fitsread("solarspectra.fts");
I = rescale(I);元のイメージを表示します。
figure
imshow(I)
title("Original Image")
関数 edge を使用して、バイナリ エッジ イメージを計算します。関数 edge によって返されたバイナリ イメージを表示します。
BW = edge(I);
figure
imshow(BW)
title("Edges of Original Image")
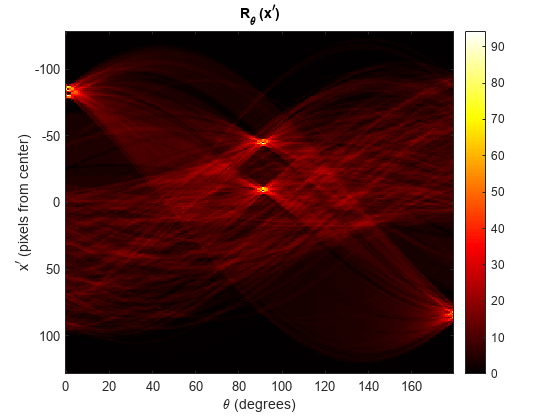
関数 radon を使用して、イメージのラドン変換を計算します。変換のピークの位置は、元のイメージ内の直線の位置に対応します。
theta = 0:179; [R,xp] = radon(BW,theta);
ラドン変換の結果を表示します。
figure imagesc(theta,xp,R) colormap(hot) xlabel("\theta (degrees)") ylabel("x^{\prime} (pixels from center)") title("R_{\theta} (x^{\prime})") colorbar
ラドン変換のピークの解釈
5 つの最大ピークの "θ" および "x'" オフセット値を計算します。xp_peak_offset 値は、イメージの中心からのピークのオフセット (ピクセル単位) を表します。
R_sort = sort(unique(R),"descend");
[row_peak,col_peak] = find(ismember(R,R_sort(1:5)));
xp_peak_offset = xp(row_peak);
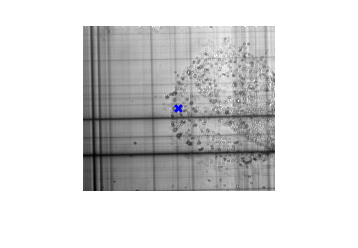
theta_peak = theta(col_peak);元のイメージの中心に "x" マーカーを追加します。イメージの行インデックスは "y" 方向にマッピングされ、列インデックスは "x" 方向にマッピングされるため、centerX はイメージ I の列数の半分、centerY は行数の半分として計算します。
centerX = ceil(size(I,2)/2); centerY = ceil(size(I,1)/2); figure imshow(I) hold on scatter(centerX,centerY,50,"bx",LineWidth=2)
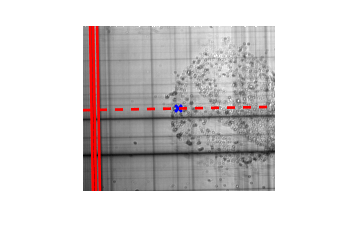
"θ" = 1 度、オフセットが中心から –80、–84、および –87 ピクセルのところに 3 つの強いピークが存在します。角度 "θ" = 1 度で中心を通る半径方向の直線を赤い破線としてプロットします。ラドンを、破線に垂直で中心から –80、–84、および –87 ピクセル シフトした赤い実線として表します。これにより、各実線が左側に配置されます。
[x1,y1] = pol2cart(deg2rad(1),5000); plot([centerX-x1 centerX+x1],[centerY+y1 centerY-y1],"r--",LineWidth=2) [x91,y91] = pol2cart(deg2rad(91),100); for i=1:3 plot([centerX-x91+xp_peak_offset(i) centerX+x91+xp_peak_offset(i)], ... [centerY+y91 centerY-y91], ... "r",LineWidth=2) end
また、"θ" = 91 度、オフセットが中心から –8 および –44 ピクセルにも 2 つの強いピークが存在します。角度 "θ" = 91 度で中心を通る半径方向の直線を緑の破線としてプロットします。ラドン ピークを、破線に垂直で中心から –8 および –44 ピクセル シフトした緑の実線として表します。これにより、各実線が下側に配置されます。
plot([centerX-x91 centerX+x91],[centerY+y91 centerY-y91],"g--",LineWidth=2) for i=4:5 plot([centerX-x1 centerX+x1], ... [centerY+y1-xp_peak_offset(i) centerY-y1-xp_peak_offset(i)], ... "g",LineWidth=2) end
