位置推定
オンボードの IMU、GPS、およびカメラを使用してプラットフォームの位置および向きを推定
これらの例では、センサーのフュージョンとフィルター処理の手法を適用することで、IMU、GPS、およびカメラのデータを使用してプラットフォームの位置を推定します。
注目の例
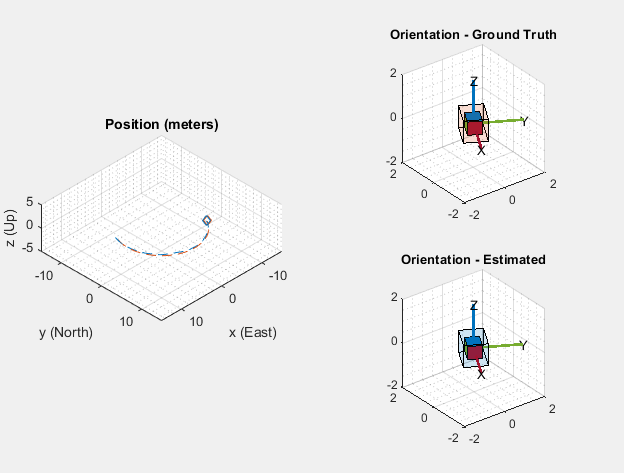
Autonomous Underwater Vehicle Pose Estimation Using Inertial Sensors and Doppler Velocity Log
Fuse GPS, doppler velocity log sensor, and inertial measurement unit measurements to estimate the pose of an autonomous underwater vehicle.

Gesture Recognition Using Inertial Measurement Units
Recognize gestures based on a handheld inertial measurement unit.

慣性ナビゲーションの IMU と GPS フュージョン
この例では、無人航空機 (UAV) またはクワッドコプターに適した IMU と GPS のフュージョン アルゴリズムを作成する方法を示します。
地上ビークルの位置と向きの推定
この例では、慣性計測ユニット (IMU) と全地球測位システム (GPS) 受信機からのデータを融合させて、地上ビークルの位置と向きを推定する方法を説明します。

Visual-Inertial Odometry Using Synthetic Data
Estimate the pose (position and orientation) of a ground vehicle using an inertial measurement unit (IMU) and a monocular camera.