モーター制御
PMSM (永久磁石同期モーター) を使用してセンサーベースおよびセンサーレスの位置アプリケーション用に開ループまたは閉ループの FOC (ベクトル制御) 技術を実装します。
サポート パッケージには、モーター制御アプリケーションをビルドして STM32 ハードウェア ボードに展開するのに役立つ参考例が含まれています (Motor Control Blockset™ および Embedded Coder® を使用)。
注目の例

Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.
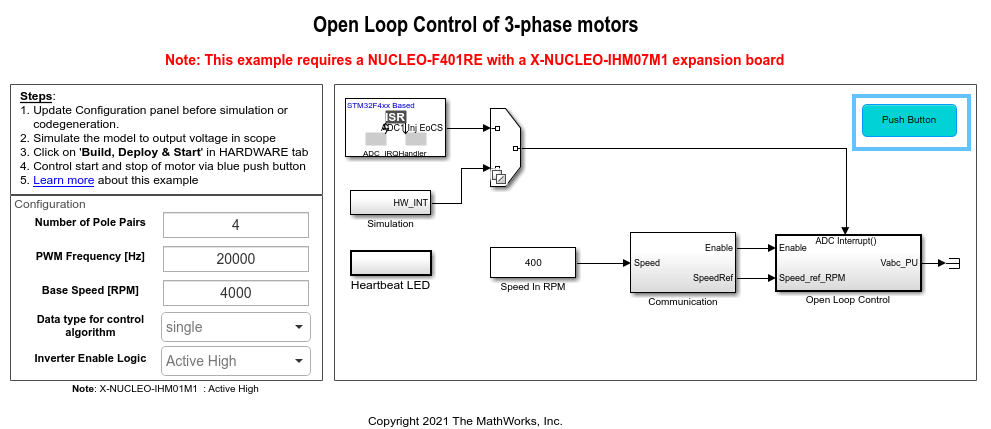
STM32 プロセッサ ベースのボードを使用した三相 AC モーターの開ループ制御
この例では、開ループ制御 (スカラー制御またはボルト/ヘルツ制御とも呼ばれる) を使用してモーターを駆動します。この手法では、モーターからのいずれのフィードバックも使用せずに、固定子電圧と周波数を変えて回転子速度を制御します。この手法を使用してハードウェア接続の整合性を確認できます。開ループ制御の一定速度のアプリケーションでは、固定周波数のモーター電源を使用します。開ループ制御の可変速度のアプリケーションでは、回転子速度を制御するために可変周波数の電源が必要です。固定子の磁束を一定に保つために、電源電圧の振幅がその周波数と比例するように維持します。
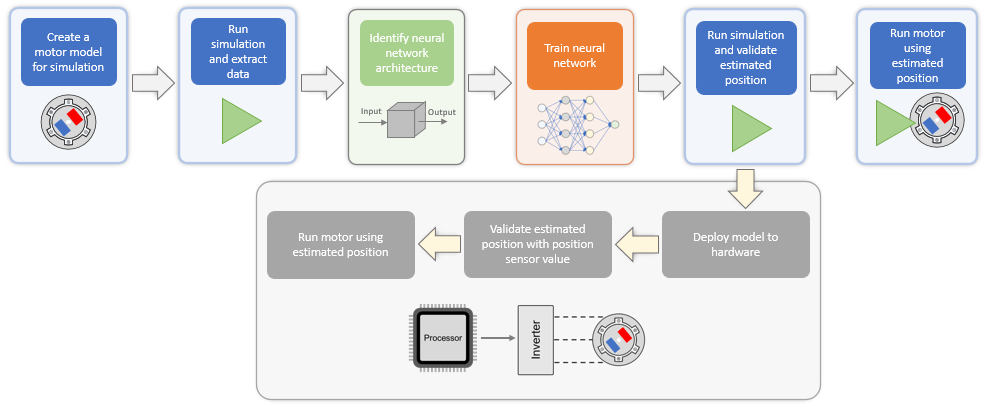
Field-Oriented Control of PMSM Using Position Estimated by Neural Network on STM32 Processor Based Boards
Implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM) using rotor position estimated by an auto-regressive neural network (ARNN) trained with Deep Learning Toolbox™.
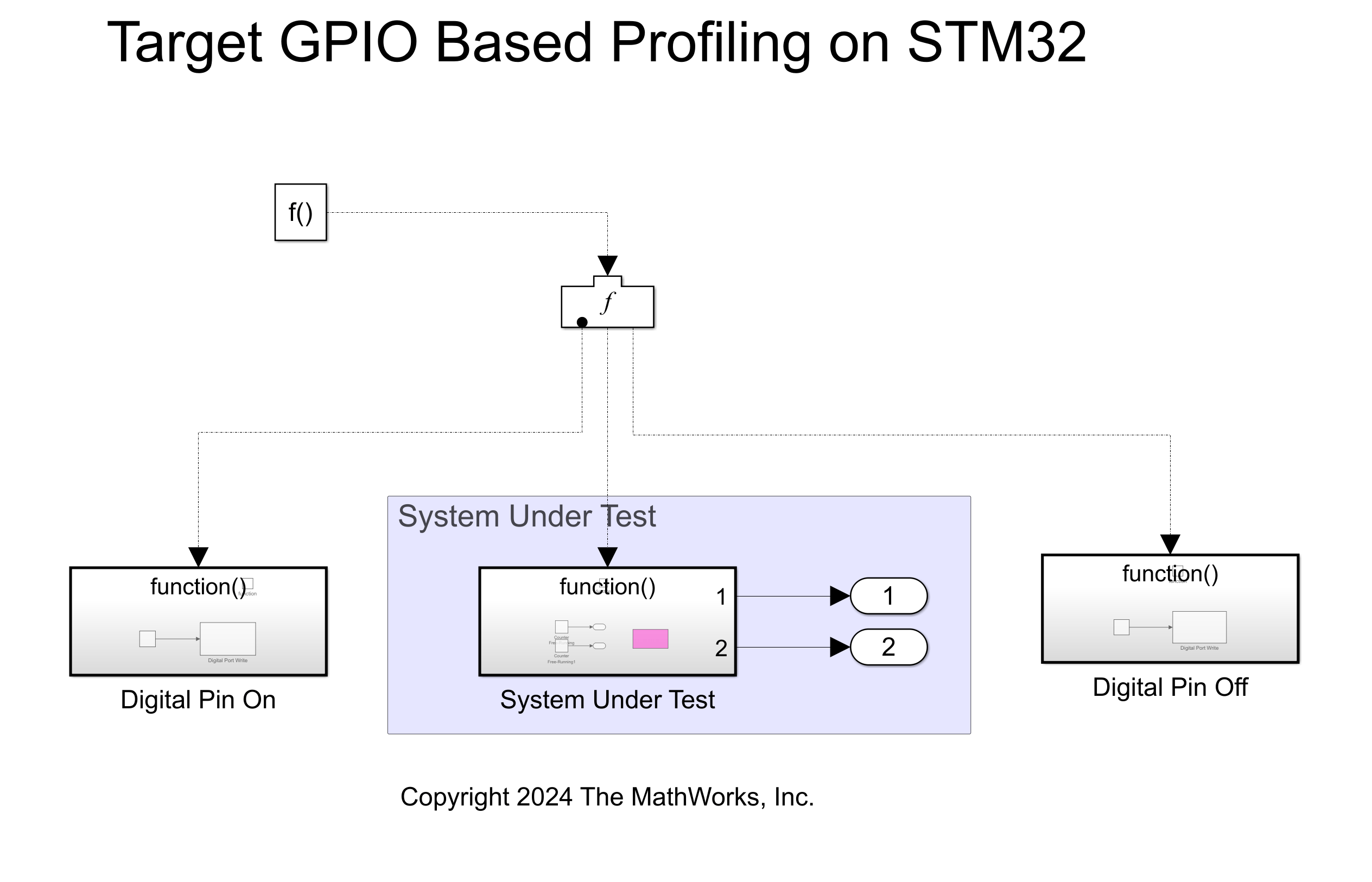
Getting Started with Hardware Profiling
Demonstrates how to perform real-time execution profiling of algorithms using the Embedded Coder® Support Package for STMicroelectronics® STM32 Processors. It covers two primary profiling methods:
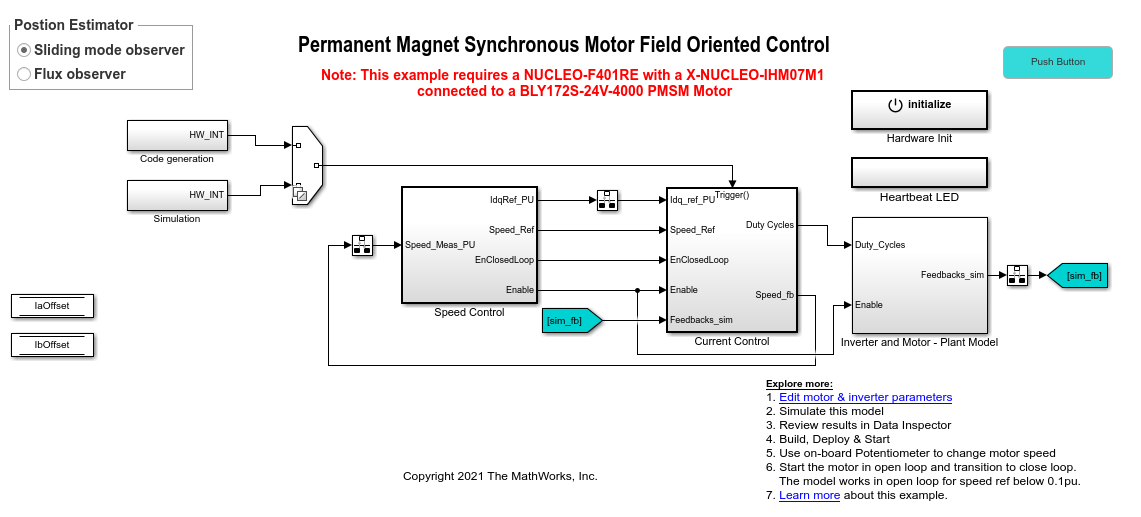
STM32 プロセッサ ベースのボードを使用した PMSM のセンサーレス ベクトル制御
この例では、三相永久磁石同期モーター (PMSM) の速度を制御するためのベクトル制御 (FOC) 手法を実装します。FOC の詳細については、ベクトル制御 (FOC) (Motor Control Blockset)を参照してください。
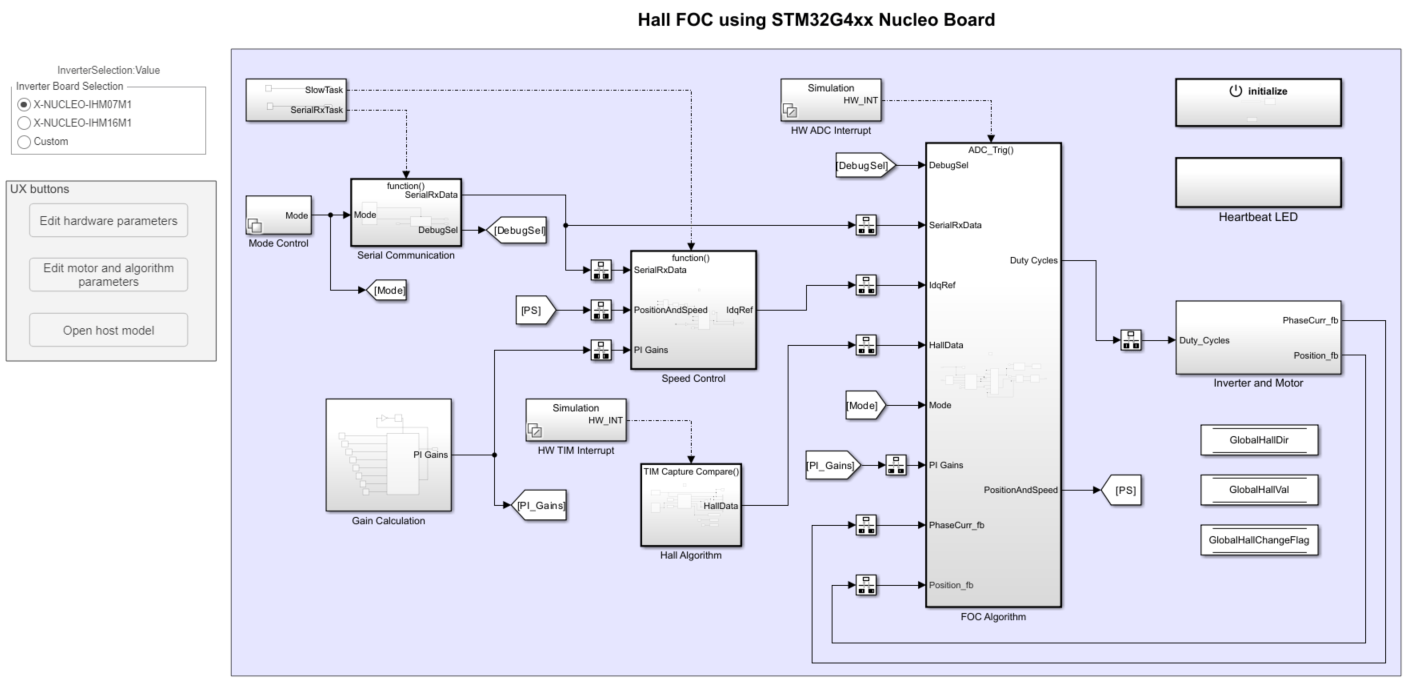
STM32G4xx ベースのプロセッサを使用したホール センサーによる PMSM のベクトル制御
この例では、三相永久磁石同期モーター (PMSM) の速度を制御するためのベクトル制御 (FOC) 手法を実装します。この FOC アルゴリズムには回転子の位置フィードバックが必要であり、それをホール センサーで取得します。
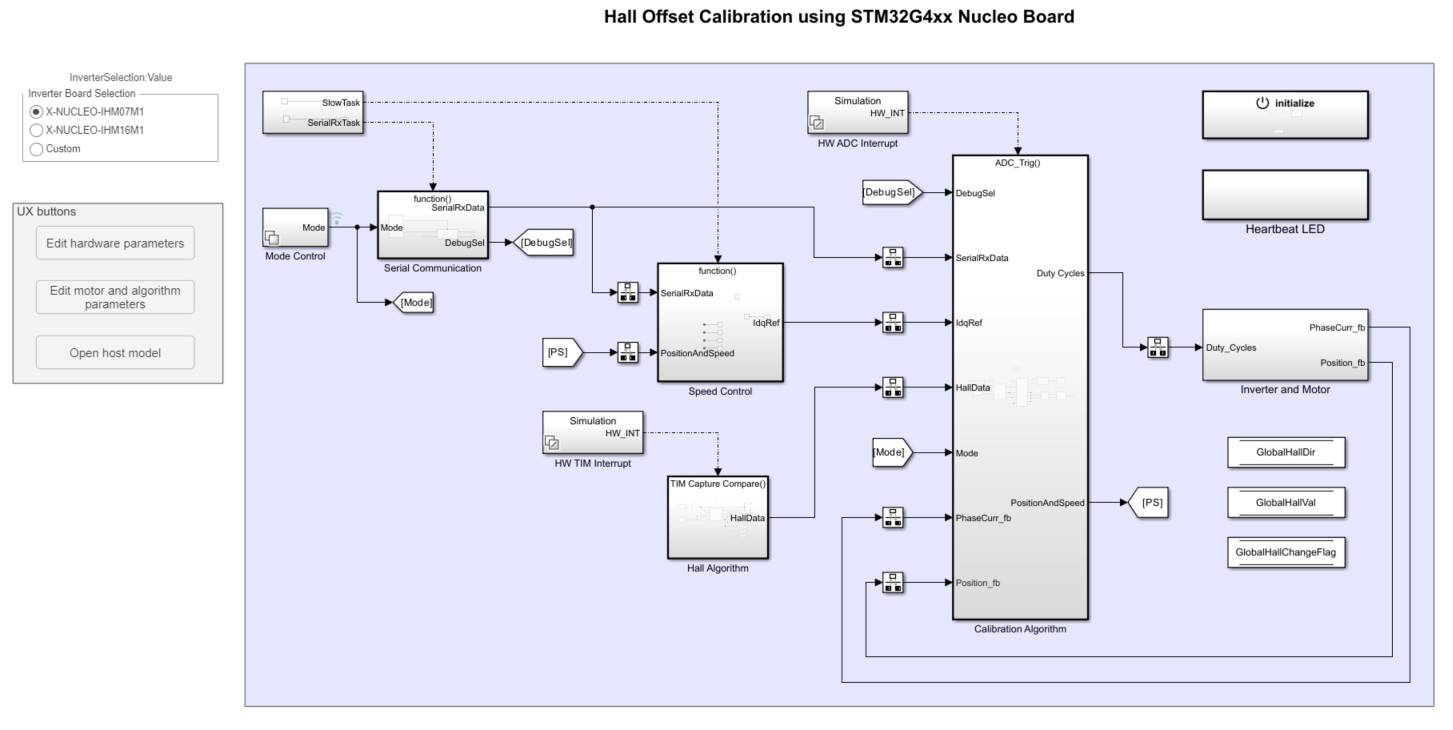
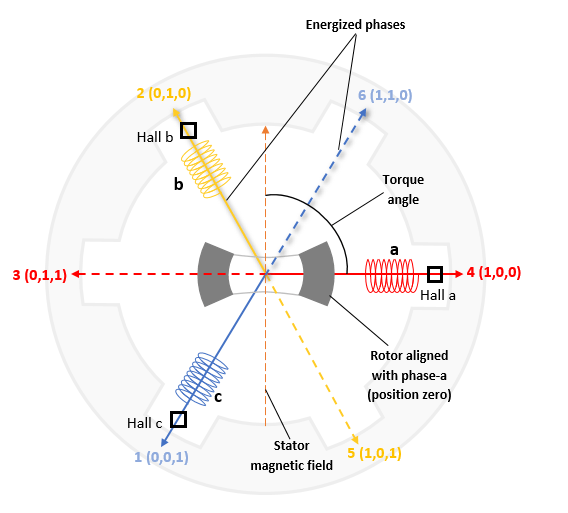
STM32 プロセッサによる PMSM のホール オフセット キャリブレーション
この例では、回転子の直軸 (d 軸) とホール センサーによって検出された位置間のオフセットを計算します。ベクトル制御 (FOC) アルゴリズムでは、永久磁石同期モーター (PMSM) を正しく駆動するためにこの位置オフセットが必要になります。オフセットを計算するために、ターゲット モデルはモーターを開ループ条件で駆動します。このモデルは、定数 (ステーターの d 軸に沿った電圧) とゼロ (ステーターの q 軸に沿った電圧) を使用し、位置ジェネレーターまたはランプ ジェネレーターによってモーターを (一定の低速で) 駆動します。位置またはランプの値がゼロに達すると、対応する回転子の位置がホール センサーのオフセット値になります。
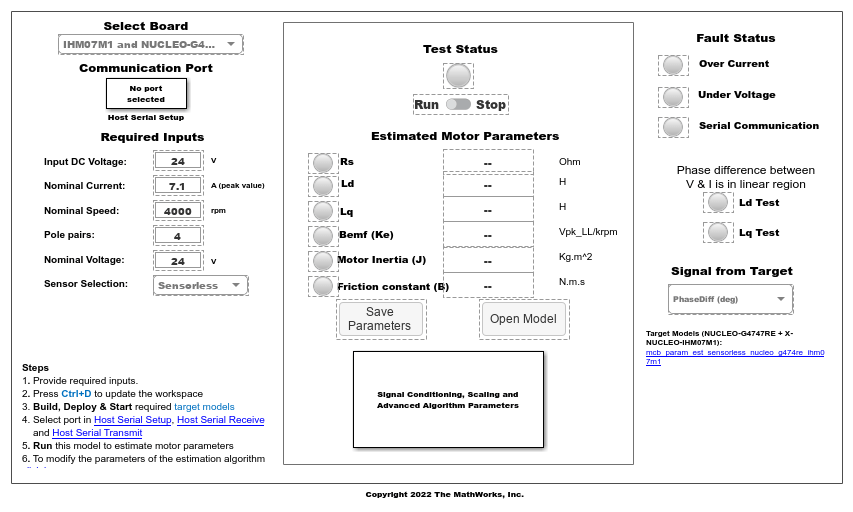
Estimate PMSM Parameters Using STM32 Processor
Determines the parameters of a permanent magnet synchronous motor (PMSM) using the recommended STM32xx based board. The tool determines these parameters:

Six-Step Commutation of BLDC Motor Using Hall Sensor Feedback for STM32G4xx Based Processors
Control the speed and direction of a three-phase brushless DC (BLDC) motor using the six-step commutation technique in 120-degree conduction mode. The example uses the switching sequence generated by the Six Step Commutation (Motor Control Blockset) block to control the rotor speed and direction by adjusting the three-phase stator voltages.
Hall Sensor Sequence Calibration for STM32G4xx Based Processors
Control a BLDC motor by calculating the Hall sensor sequence with respect to position zero of the rotor in open-loop control. By using this method, you can use six-step commutation to control the motor without the need to label the Hall sensors or derive the switching sequence. Run this example on STM32G4xx Based Processors and obtain the Hall sequence, and use this Hall sequence with the Six Step Commutation (Motor Control Blockset) block to run the motor in closed-loop as explained in the Six-Step Commutation of BLDC Motor Using Hall Sensor Feedback for STM32G4xx Based Processors example. The Hall sequence calibration algorithm drives the motor through a full mechanical revolution and computes the Hall sensor sequence relative to the rotor's position zero in open-loop control.