エクスターナル モード シミュレーションによるホストとターゲット間の通信
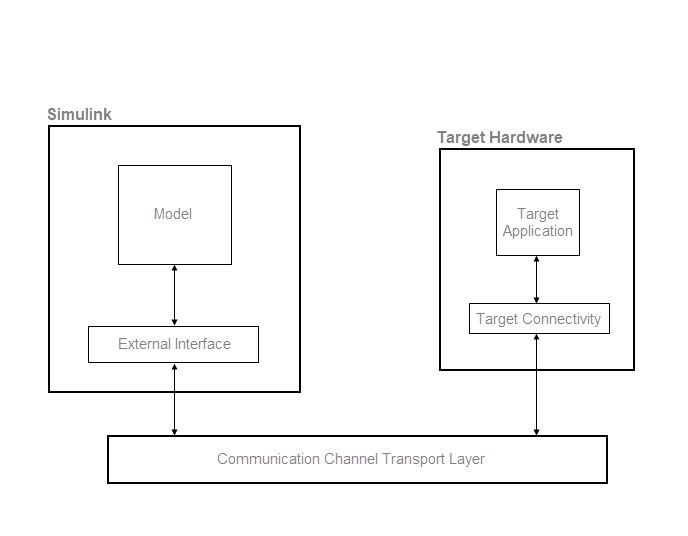
ラピッド プロトタイピングのためにエクスターナル モード シミュレーションを使用できます。エクスターナル モード シミュレーションは、開発用コンピューター (ホスト) 上の Simulink® と、コード生成やビルド プロセスによって作成された実行可能ファイルを実行するターゲット ハードウェアの間で通信チャネルを確立します。
通信チャネルを通じて以下が可能です。
ブロック パラメーターをリアル タイムに変更、つまり調整します。モデルのパラメーターを変更すると、Simulink は実行中のターゲット アプリケーションに新しい値をダウンロードします。
実行中のターゲット アプリケーションの信号データを監視および保存します。
チャネルの下位のトランスポート層がメッセージの物理伝送を処理します。Simulink と生成モデル コードはこの層から独立しています。トランスポート層とそのインターフェイス コードは、メッセージとデータ パケットの書式設定、伝送、および受信を行う独立した複数のモジュールに分かれています。
エクスターナル モードの通信メカニズム
Simulink は、エクスターナル モード シミュレーションに対して 2 つの通信メカニズムをサポートします。どちらのメカニズムを使用するかを決定するには、以下の表の情報を確認します。
| 通信メカニズム | 以下によりサポート | 選択理由 |
|---|---|---|
| XCP (汎用測定/キャリブレーション プロトコル) | ERT および GRT システム ターゲット ファイル。 | XCP エクスターナル モード:
XCP エクスターナル モード シミュレーションの実行の詳細については、以下を参照してください。
|
| TCP/IP およびシリアル (RS-232) | ERT および GRT システム ターゲット ファイル。 Simulink サポート パッケージ。 | データの可視化、エクスポート、および保存にはシミュレーション データ インスペクターは使用しません。 信号のトリガーを使用する場合。 TCP/IP およびシリアル エクスターナル モード シミュレーションの実行の詳細については、以下を参照してください。
|
エクスターナル モードの Simulink 機能のサポート
以下の表に、両方の形式のエクスターナル モード シミュレーションに対する機能サポートをまとめています。
| 機能 | XCP のサポート | TCP/IP およびシリアルのサポート | |
|---|---|---|---|
パラメーターの調整 | Dashboard ブロックを使用 | あり | あり |
調整可能なブロック パラメーター | あり | あり | |
シミュレーション データ インスペクター | あり。参照モデル内の信号が含まれます。 | なし | |
ロジック アナライザー | あり。参照モデル内の信号が含まれます。 | なし | |
ターゲット アプリケーションから信号を受信して表示するブロック。 | Dashboard | あり | なし |
Floating Scope、Scope | あり。提供された信号のログ記録が、ブロックの入力に対して有効になっています。 | あり | |
Spectrum Analyzer、Time Scope (DSP System Toolbox™) | あり。提供された信号のログ記録が、ブロックの入力に対して有効になっています。 | あり | |
Display | あり。提供された信号のログ記録が、ブロックの入力に対して有効になっています。 | あり | |
To Workspace | あり。提供された信号のログ記録が、ブロックの入力に対して有効になっています。 | あり | |
ユーザーが記述した S-Function。 ユーザーが記述したブロックによってエクスターナル モードのサポートを可能にするメソッドが S-Function API に組み込まれています。 | あり。提供された信号のログ記録が、ブロックの入力に対して有効になっています。 | あり | |
XY グラフ | あり | あり | |
あり。提供された信号のログ記録が、サブシステムの入力に対して有効になっています。 | あり | ||
[ハードウェア ボードで実行] アプリによるエクスターナル モード シミュレーション
MathWorks® サポート パッケージがサポートしているターゲット ハードウェア上でエクスターナル モード シミュレーションを実行するには、[ハードウェア ボードで実行] アプリを使用します。エクスターナル モード シミュレーションについて、以下を行います。
開発用コンピューターでターゲット アプリケーションをビルドします。
ターゲット アプリケーションをターゲット ハードウェアに展開します。
ターゲット ハードウェア上で実行するターゲット アプリケーションに Simulink を接続します。
ターゲット ハードウェア上で生成コードの実行を開始します。
このアプリを使用すると、手順を個別に実行するか、1 回のクリックで実行できます。次の表に、アプリがハードウェア ボードに提供するワークフローのサポートを示します。
| ワークフロー機能またはタスク | ターゲット ハードウェア | ||
|---|---|---|---|
| 開発用コンピューター | ハードウェア ボード | ||
| あり | あり | |
| ステップ単位 | [接続] | あり | あり |
[開始] | あり | あり | |
エクスターナル モード シミュレーションのセキュリティ
開発用コンピューターとターゲット ハードウェアへのアクセスが安全であることを確認します。
次の表に示されているセキュリティ対策を適用して、開発用コンピューターとターゲット アプリケーション間に安全な通信チャネルを提供します。
| 通信プロトコル | セキュリティ対策 |
|---|---|
XCP on TCP/IP、TCP/IP | 信頼されているプライベート ネットワークまたは仮想プライベート ネットワーク (VPN) 内で開発用コンピューターとターゲット アプリケーションを実行します。 |
XCP on Serial、Serial | シリアル ケーブルなど、開発用コンピューターとターゲット アプリケーション間のポイントツーポイント リンクを使用します。 |
量産用のコードを生成する前に、ターゲット アプリケーションへの意図しないアクセスのリスクを軽減するために、エクスターナル モード設定を無効にします。