iirftransf
IIR frequency transformation of digital filter
Syntax
Description
[
returns the numerator and the denominator coefficients of the transformed filter. num,den] = iirftransf(b,a,allpassNum,allpassDen)
The iirftransf function transforms a prototype filter, specified by
the numerator b and denominator a, by using an
allpass mapping filter, specified by the numerator allpassNum and the
denominator allpassDen. If you do not specify an allpass mapping
filter, then the function returns an original filter.
tfiltObj = iirftransf(pfiltObj,allpassNum,allpassDen)
Examples
Using the iirftransf function, extend the passband of a lowpass IIR filter by using an allpass mapping filter.
Input Lowpass IIR Filter
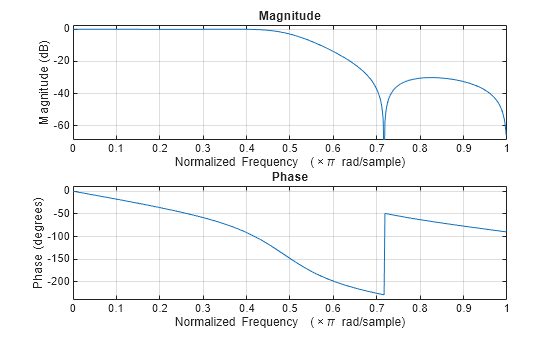
Design a prototype real IIR lowpass elliptic filter with a gain of about –3 dB at 0.5π rad/sample.
[b,a] = ellip(3,0.1,30,0.409); freqz(b,a)
Transform Filter Using iirftransf
Extend the passband of the real prototype filter by specifying the allpass mapping filter as a vector of numerator and denominator coefficients, alpnum and alpden respectively. Use the allpasslp2lp function to generate the allpass mapping filter coefficients.
Specify the prototype filter as a vector of numerator and denominator coefficients, b and a respectively.
[b,a] = ellip(3,0.1,30,0.409); [alpnum,alpden] = allpasslp2lp(0.5,0.25); [num,den] = iirftransf(b,a,alpnum,alpden);
Compare the magnitude response of the filters.
filterAnalyzer(b,a,num,den,FilterNames=["PrototypeFilterTFForm","TransformedFilterFromTFForm"]);
![]()
You can also specify the input lowpass IIR filter as a matrix of coefficients. Pass the second-order section matrices as inputs. The numerator and the denominator coefficients of the transformed filter are given by num2 and den2, respectively.
[ss,g] = tf2sos(b,a);
[num2,den2] = iirftransf(ss(:,1:3),ss(:,4:6),...
alpnum,alpden);Compare the magnitude response of the filters.
filterAnalyzer(ss(:,1:3),ss(:,4:6),num2,den2,FilterNames=["PrototypeFilterSOSForm",... "TransformedFilterFromSOSForm"]);
![]()