このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
sim
同定されたモデルの応答のシミュレーション
構文
説明
sim(___) は同定されたモデルのシミュレートされた応答をプロットします。
例
入力データを使用した状態空間モデルのシミュレート
推定データを読み込みます。
load sdata2 tt2
3 次状態空間モデルを推定します。
sys = ssest(tt2,3);
推定データから入力チャネルを使用して同定されたモデルをシミュレートします。
y = sim(sys,tt2);
シミュレートされたモデル応答へのノイズの追加
データを読み込み、同定されたモデルを取得します。
load sdata2 tt2 sys = n4sid(tt2,3);
sys は、部分空間法を使用して推定された 3 次状態空間モデルです。
シミュレーション オプション セットを作成して、ノイズをシミュレートされたモデル応答に追加します。
opt1 = simOptions('AddNoise',true);モデルのシミュレーションを実行します。
y = sim(sys,tt2,opt1);
既定のガウス ホワイト ノイズは、モデルのノイズ伝達関数によってフィルター処理され、シミュレートされたモデル応答に追加されます。
NoiseData オプションを使用して、独自のノイズ信号 e を追加することもできます。
e = randn(length(tt2.u),1); opt2 = simOptions('AddNoise',true,'NoiseData',e);
モデルのシミュレーションを実行します。
y = sim(sys,tt2,opt2);
推定時に取得された初期状態を使用したモデルのシミュレート
データを読み込みます。
load sdata1 umat1 ymat1 Ts
推定オプションを指定して初期状態を推定します。
estimOpt = ssestOptions('InitialState','estimate');
状態空間モデルを推定し、推定された初期状態の値を返します。
[sys,x0] = ssest(umat1,ymat1,2,'Ts',Ts,estimOpt);シミュレーションの初期状態を指定します。
simOpt = simOptions('InitialCondition',x0);モデルをシミュレートし、モデル応答および標準偏差を取得します。
[y,y_sd] = sim(sys,umat1,simOpt);
状態空間モデルの標準偏差および状態軌跡の推定
推定データを読み込み、状態空間モデルを推定します。
load iddata1 z1 sys = ssest(z1,2);
標準偏差および状態軌跡を返します。
[y,y_sd,x] = sim(sys,z1);
シミュレートされた応答の状態軌跡および標準偏差の推定
推定データを読み込み、状態空間モデルを推定します。
load sdata1 umat1 ymat1 Ts sys = ssest(umat1,ymat1,2,'Ts',Ts);
シミュレーション オプション セットを作成し、初期状態を指定します。
opt = simOptions('InitialCondition',[1;2]);初期状態の共分散を指定します。
opt.X0Covariance = [0.1 0; 0 0.1];
シミュレートされた応答の標準偏差 y_sd および状態軌跡 x_sd を計算します。
[y,y_sd,x,x_sd] = sim(sys,umat1,opt);
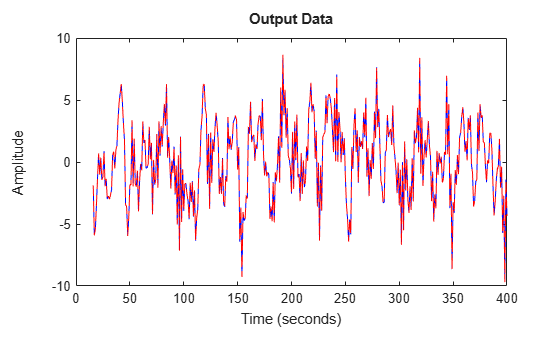
シミュレートされたモデル応答のプロット
同定されたモデルを取得します。
load sdata2 tt2 sys = tfest(tt2,3);
sys は、測定されたデータ tt2 に対して推定された 3 次伝達関数をカプセル化する idtf モデルです。
モデルのシミュレーションを実行します。
sim(sys,tt2)

非線形 ARX モデルのシミュレート
入力レベルを 1、出力レベルを 10 とし、既知の平衡点に基づいて単入力単出力の非線形 ARX モデルをシミュレートします。
サンプル データを読み込みます。
load iddata2データから非線形 ARX モデルを推定します。
M = nlarx(z2,[2 2 1],'idTreePartition');過去のデータに基づいて、モデルの現在の状態を推定します。入力変数と出力変数内のラグ数 (ここでは 2) と同じ数の過去のサンプルを指定します。
x0 = data2state(M,struct('Input',ones(2,1),'Output',10*ones(2,1)));
data2state で返された初期状態を使用してモデルをシミュレートします。
opt = simOptions('InitialCondition',x0);
sim(M,z2,opt)
前のシミュレーションの最後からの続行
前のシミュレーション実行の最後から非線形 ARX モデルのシミュレーションを続行します。
データから非線形 ARX モデルを推定します。
load iddata2
M = nlarx(z2,[2 2 1],idTreePartition);入力データ z2 の最初の半分を使用してモデルをシミュレートします。ゼロの初期状態からシミュレーションを開始します。
u1 = z2(1:200,[]); opt1 = simOptions('InitialCondition','zero'); ys1 = sim(M,u1,opt1);
入力データ z2 の後ろの半分を使用して別のシミュレーションを開始します。最初のシミュレーションの最後からモデルの同じ状態を使用します。
u2 = z2(201:end,[]);
2 番目のシミュレーションの初期状態を正しく設定するには、最初のシミュレーションの入力 u1 と出力 ys1 を 1 つの iddata オブジェクトにパッケージ化します。このデータを次のシミュレーションの初期状態として渡します。
firstSimData = [ys1,u1];
opt2 = simOptions('InitialCondition',firstSimData);
ys2 = sim(M,u2,opt2);すべての入力データ z2 を使用して完全なシミュレーションと比較して、2 つのシミュレーションを検証します。まず、入力データのセット全体を抽出します。
uTotal = z2(:,[]); opt3 = simOptions('InitialCondition','zero'); ysTotal = sim(M,uTotal,opt3);
3 つの応答 ys1、ys2、および ysTotal をプロットします。ys1 は ysTotal の最初の半分と等しくなっているはずです。ys2 は ysTotal の後ろの半分と等しくなっているはずです。
plot(ys1,'b',ys2,'g',ysTotal,'k*')

プロットでは、3 つの応答 ys1、ys2、および ysTotal が期待どおりにオーバーラップしていることが示されています。
モデル応答と出力データの突き合わせ
応答がデータ セット z2 の出力に最も一致するようにモデル M の初期状態を推定します。
サンプル データを読み込みます。
load iddata2;データから非線形 ARX モデルを推定します。
M = nlarx(z2,[4 3 2],idWaveletNetwork('NumberOfUnits',20));シミュレートされた応答で z2.y に最も適合するように M の初期状態を推定します。
x0 = findstates(M,z2,Inf);
モデルのシミュレーションを実行します。
opt = simOptions('InitialCondition',x0);
ysim = sim(M,z2.u,opt);シミュレートされたモデル出力 ysim を z2 の出力信号と比較します。
time = z2.SamplingInstants;
plot(time,ysim,time,z2.y,'.')
既知の入力および不明な出力を使用した定常状態に近いモデルのシミュレート
入力が 1 であるとわかっているが、出力が不明な場合に、定常状態に近いモデルのシミュレーションを開始します。
サンプル データを読み込みます。
load iddata2データから非線形 ARX モデルを推定します。
M = nlarx(z2,[4 3 2],idWaveletNetwork);
入力 1 および不明なターゲット出力の平衡状態値を求めます。
x0 = findop(M,'steady',1, NaN);初期状態 x0 を使用してモデルをシミュレートします。
opt = simOptions('InitialCondition',x0);
sim(M,z2.u,opt)
定常状態の操作点における Hammerstein-Wiener モデルのシミュレート
サンプル データを読み込みます。
load iddata2Hammerstein-Wiener モデルを作成します。
M = nlhw(z2,[4 3 2],[],idPiecewiseLinear);
入力レベル 1 および不明な出力レベルに対応する定常状態の操作点の値を計算します。
x0 = findop(M,'steady',1,NaN);推定初期状態を使用してモデルをシミュレートします。
opt = simOptions('InitialCondition',x0);
sim(M,z2.u)
時系列モデルのシミュレート
時系列データを読み込み、最小二乗法を使用して AR モデルを推定します。
load iddata9 z9 sys = ar(z9,6,'ls');
時系列データでは、"N" 行 0 列の入力データ セットを使用して目的のシミュレーションの長さ "N" = 200 を指定します。
data = iddata([],zeros(200,0),z9.Ts);
履歴出力サンプルとして時系列の初期サンプルを使用するように初期状態を設定します。
IC = struct('Input',[],'Output',z9.y(1:6)); opt = simOptions('InitialCondition',IC);
モデルのシミュレーションを実行します。
sim(sys,data,opt)

モデル シミュレーションでの履歴データの使用の理解
モデルをシミュレートする際に初期状態の代わりとして履歴入出力データを使用します。最初に sim コマンドを使用してシミュレートし、simOptions オプション セットを使用して履歴データを指定します。その後、履歴データを初期状態に手動でマッピングしてシミュレートされた出力を再現します。
2 入力 1 出力のデータ セットを読み込みます。
load iddata7 z7
データを使用して 5 次状態空間モデルを同定します。
sys = n4sid(z7,5);
データ セットを 2 つの部分に分けます。
zA = z7(1:15); zB = z7(16:end);
zB の入力信号を使用してモデルをシミュレートします。
uSim = zB;
シミュレーショでは初期状態が必要です。zA の信号値は履歴データです。つまり、zB のすぐ前の時点におけるデータの入力値と出力値です。必要な初期状態の代わりに zA を使用します。
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = simOptions('InitialCondition',IO);
モデルのシミュレーションを実行します。
ysim = sim(sys,uSim,opt);
次に、履歴データを sys の初期状態に手動でマッピングして出力を再現します。これを行うには、data2state コマンドを使用します。
xf = data2state(sys,zA);
xf には、zA の最新のデータ サンプルのすぐ後の時点における sys の状態値が含まれています。
xf を初期状態として使用してシステムをシミュレートします。
opt2 = simOptions('InitialCondition',xf);
ysim2 = sim(sys,uSim,opt2);sim コマンドの出力 ysim と手動による計算結果 ysim2 をプロットします。
plot(ysim,'b',ysim2,'--r')
ysim2 は ysim と同じです。
連続時間ニューラル状態空間オブジェクトのシミュレート
idNeuralStateSpaceオブジェクトの状態および出力ネットワークはランダムに初期化されます。再現性を確保するために、乱数発生器のシードを固定します。
rng(0)
2 つの状態、2 つの入力、および 3 つの出力を使用して連続時間ニューラル状態空間オブジェクトを作成します。
nss = idNeuralStateSpace(2,NumInputs=2,NumOutputs=3)
Continuous-time Neural State-Space Model with 3 outputs, 2 states, and 2 inputs
dx/dt = f(x(t),u(t))
y_1(t) = x(t) + e_1(t)
y_2(t) = g(x(t),u(t)) + e_2(t)
y(t) = [y_1(t); y_2(t)]
f(.) network:
Deep network with 2 fully connected, hidden layers
Activation function: Tanh
g(.) network:
Deep network with 2 fully connected, hidden layers
Activation function: Tanh
Inputs: u1, u2
Outputs: y1, y2, y3
States: x1, x2
Status:
Created by direct construction or transformation. Not estimated.
More information in model's "Report" property.
時間シーケンス、乱数入力信号、およびランダム初期状態を定義します。
t = (0:1:10)'; u = rand(length(t),2); x0 = 0.3*randn(2,1);
idNeuralStateSpace システムをシミュレートする際には、数値配列としての入力データの指定はサポートされていません。この例では、u の値がベクトル t の時間点に関連付けられるように指定して、入力データを timetable オブジェクトに変換します。
u = array2timetable(u,RowTimes=seconds(t));
シミュレーションが x0 から開始し、ベクトル t の時間点で出力が計算されるようにシミュレーション オプション オブジェクトを設定します。
simOpt = simOptions('InitialCondition',x0,'OutputTimes',t);
(未学習の) ニューラル状態空間システム nss をシミュレートします。
y = sim(nss,u,simOpt);
シミュレートされた出力をプロットします。
plot(t,y.Variables); ylabel("Outputs"); xlabel("Time (seconds)") title("Neural state-space system: simulated output")

入力引数
出力引数
ヒント
推定モデルと検証データ セットを測定したシステムの初期状態が異なる場合、シミュレートされた応答と測定された応答も異なることがあります。これは応答の開始時に特に顕著です。差を最小化するには、
findstatesを使用して初期状態値を推定し、推定された値を使用して、simOptionsでInitialConditionオプションを設定します。例については、モデル応答と出力データの突き合わせを参照してください。
アルゴリズム
"シミュレーション" とは、入力データおよび初期状態を使用してモデル応答を計算することを意味します。sim は以下のシステムをシミュレートします。

ここで
u(t) はシミュレーション入力データ
udataです。y(t) はシミュレートされた出力応答です。
G は入力から出力への伝達関数であり、
sysで定義されます。シミュレーションの初期状態。simOptionsを使用して指定します。G の初期状態を設定します。e(t) はオプションのノイズ信号です。ノイズをシミュレーションに追加するには、
simOptionsオプション セットを作成し、AddNoiseオプションをtrueに設定します。また、NoiseDataオプションを指定して既定のノイズ信号を変更できます。H はノイズ伝達関数であり、
sysで定義されます。δu は、入力がモデルのシミュレートに使用される前に入力信号 u(t) から減算されるオプションの入力オフセットです。
simOptionsを使用してInputOffsetオプションを設定して、入力オフセットを指定します。δy は、シミュレーション後に出力応答 y(t) に加算されるオプションの出力オフセットです。
simOptionsを使用してOutputOffsetオプションを設定して、出力オフセットを指定します。
シミュレーションの初期状態、入出力オフセット、およびノイズ信号データの指定の詳細については、simOptions を参照してください。複数実験データの場合、実験ごとに別個にこれらのオプションを指定できます。
代替方法
バージョン履歴
R2006a より前に導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)