このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
Simulink での CAN FD 通信入門
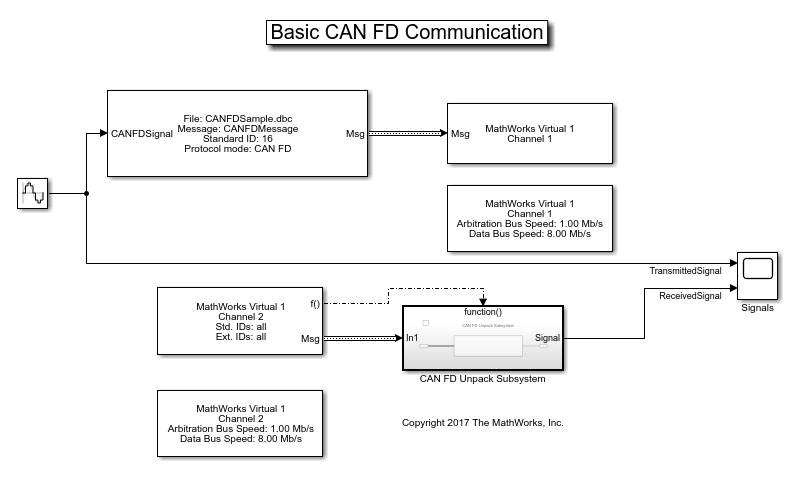
この例では、MathWorks ® 仮想 CAN FD チャネルを使用して、Simulink ® で CAN FD メッセージの送受信を設定する方法を示します。仮想チャネルはループバック構成で接続されます。
Vehicle Network Toolbox ™ は、Controller Area Network Flexible Data (CAN FD) 形式を利用したネットワーク上で Simulink モデルを介してライブ メッセージを送受信するための Simulink ブロックを提供します。この例では、CAN FD Configuration、CAN FD Pack、CAN FD Transmit、CAN FD Receive、および CAN FD Unpack ブロックを使用して、CAN FD バスを介してデータ転送を実行します。これらのブロックは CAN ブロックと同様に動作しますが、CAN FD プロトコルをサポートするネットワークまたはデバイスでのみ使用することを目的としています。
CAN FDメッセージの送受信
正弦波データ信号を伝送する CAN FD メッセージを送受信するモデルを作成します。モデルは、タイムステップごとに 1 つのメッセージを送信します。DBC ファイルは、モデルで使用されるメッセージと信号を定義します。
CAN FDメッセージを処理する
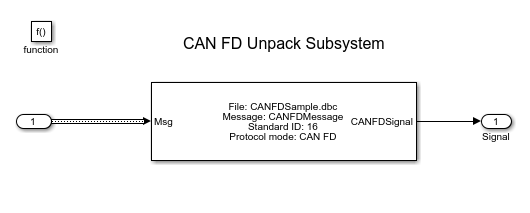
CAN FD Receive ブロックは、特定のタイムステップで新しいメッセージを受信すると、関数呼び出しトリガーを生成します。これは、モデル内の他のブロックに、メッセージがデコード アクティビティに使用できることを示します。信号のデコードと処理は Function-Call Subsystem (Simulink) 内で実行されます。
信号データを可視化する
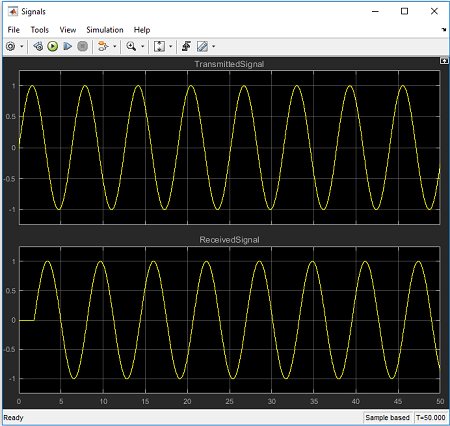
送信前と送信後の正弦波の値をプロットします。X 軸はシミュレーションのタイムステップに対応し、Y 軸は信号の値に対応します。2 つのグラフ間の位相シフトは、信号がネットワークを伝わる際の伝播遅延を表していることに注意してください。
例を拡張する
この例では、MathWorks 仮想 CAN FD チャネルを使用します。モデルを他のサポートされているハードウェアに接続できます。定期的なレートで送信するようにモデルを変更することもできます。