行列の回転と変換
この例では、Symbolic Math Toolbox™ と行列を使って 3 次元の回転と変換を行う方法を示します。
パラメトリックな表面の定義とプロット
パラメトリックな表面 x(u,v)、y(u,v)、z(u,v) を次のように定義します。
syms u v x = cos(u)*sin(v); y = sin(u)*sin(v); z = cos(v)*sin(v);
fsurf を使用して表面をプロットします。
fsurf(x,y,z)
axis equal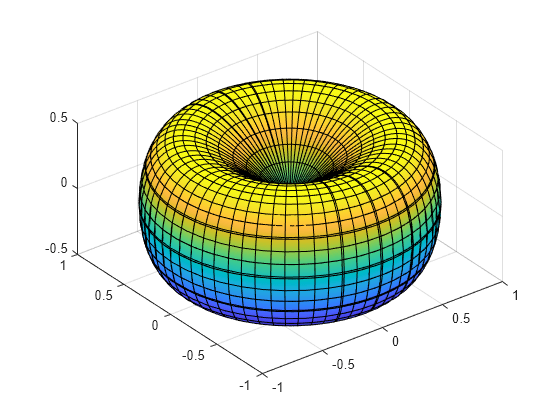
回転行列の作成
x 軸、y 軸、z 軸を中心とする角度 t の平面回転をそれぞれ表す 3 行 3 列の行列 Rx、Ry および Rz を作成します。
syms t
Rx = [1 0 0; 0 cos(t) -sin(t); 0 sin(t) cos(t)]Rx =
Ry = [cos(t) 0 sin(t); 0 1 0; -sin(t) 0 cos(t)]
Ry =
Rz = [cos(t) -sin(t) 0; sin(t) cos(t) 0; 0 0 1]
Rz =
各軸を中心とする 3 次元の回転
最初に、表面を x 軸を中心として 45 度反時計回りに回転させます。
xyzRx = Rx*[x;y;z]; Rx45 = subs(xyzRx, t, pi/4); fsurf(Rx45(1), Rx45(2), Rx45(3)) title('Rotating by \pi/4 about x, counterclockwise') axis equal

z 軸を中心として 90 度時計回りに回転させます。
xyzRz = Rz*Rx45; Rx45Rz90 = subs(xyzRz, t, -pi/2); fsurf(Rx45Rz90(1), Rx45Rz90(2), Rx45Rz90(3)) title('Rotating by \pi/2 about z, clockwise') axis equal

y 軸を中心として 45 度時計回りに回転させます。
xyzRy = Ry*Rx45Rz90; Rx45Rz90Ry45 = subs(xyzRy, t, -pi/4); fsurf(Rx45Rz90Ry45(1), Rx45Rz90Ry45(2), Rx45Rz90Ry45(3)) title('Rotating by \pi/4 about y, clockwise') axis equal

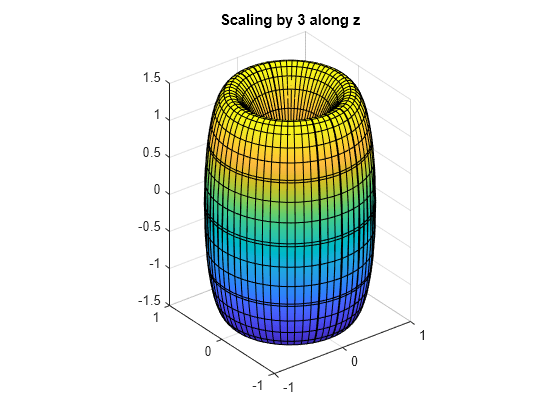
スケーリングと回転
表面を z 軸に沿って係数 3 でスケーリングします。z の式に 3 を乗算して、z = 3*z とすることができます。より一般的な方法は、スケーリング行列を作成した後でスケーリング行列に座標ベクトルを乗算することです。
S = [1 0 0; 0 1 0; 0 0 3]; xyzScaled = S*[x; y; z]
xyzScaled =
fsurf(xyzScaled(1), xyzScaled(2), xyzScaled(3)) title('Scaling by 3 along z') axis equal
スケーリングした表面を x 軸、y 軸および z 軸を中心に、z、y、x の順番で 45 度時計回りに回転させます。この変換の回転行列は以下のとおりです。
R = Rx*Ry*Rz
R =
回転行列を使用して新しい座標を求めます。
xyzScaledRotated = R*xyzScaled; xyzSR45 = subs(xyzScaledRotated, t, -pi/4);
表面をプロットします。
fsurf(xyzSR45(1), xyzSR45(2), xyzSR45(3)) title('Rotating by \pi/4 about x, y, and z, clockwise') axis equal

回転行列 R の特性の確認
回転行列は直交行列です。したがって、R の転置はその逆でもあり、R の行列式は 1 です。
simplify(R.'*R)
ans =
simplify(det(R))
ans =