BMI160 IMU Sensor
Measure linear acceleration, angular rate, and temperature from BMI160 sensor
Since R2021b
Add-On Required: This feature requires the Simulink Support Package for Raspberry Pi Hardware add-on.

Libraries:
Simulink Support Package for Raspberry Pi Hardware /
Sensors /
IMU Sensors
Description
The BMI160 block outputs the values of linear acceleration and angular rate along x-, y- and z- axes as measured by the BMI160 sensor connected to Raspberry Pi® board. The block also outputs the temperature as read by the BMI160 sensor. If you connect the BMM150 as a secondary sensor to BMI160, the BMI160 block also outputs magnetic field along x-, y- and z- axes as measured by the BMM150 sensor.
The block supports Single tap, Double tap, High g detection, Any motion, Slow motion, Flat detection, and Data ready interrupts.
Interrupt source output is a 1-by-7 vector with
elements corresponding to the source of single tap, double tap, high g detection, any motion,
slow motion, flat detection, and data ready interrupts respectively. 1
indicates that it is the source, 0 indicates that it is not a source, and
-1 indicates that the interrupt is not active.
Tap source output is a 1-by-4 vector, with the first
three elements indicating whether the single tap / double tap occurred in X, Y and Z axis, and
the fourth element indicating whether it is on positive or negative direction of the axis.
High g source output is a 1-by-4 vector, with the first
three elements indicating whether the High g interrupt occurred in X,Y and Z axis and the
fourth element indicating whether it is on positive or negative direction of the axis. Any
motion source output is a 1-by-4 vector which shows on
which of the X,Y and Z axis did Any motion interrupt occur and whether it is on positive or
negative direction of the axis. First byte denotes whether the event occurred on X axis,
second byte denotes whether the event occurred on Y axis, third byte denotes whether the event
occurred on Z axis and fourth byte denotes the direction. For direction byte
0 denotes negative side and 1 denotes positive and for
other bytes 1 denotes that axis is the source and 0 denotes that axis is
not the source.
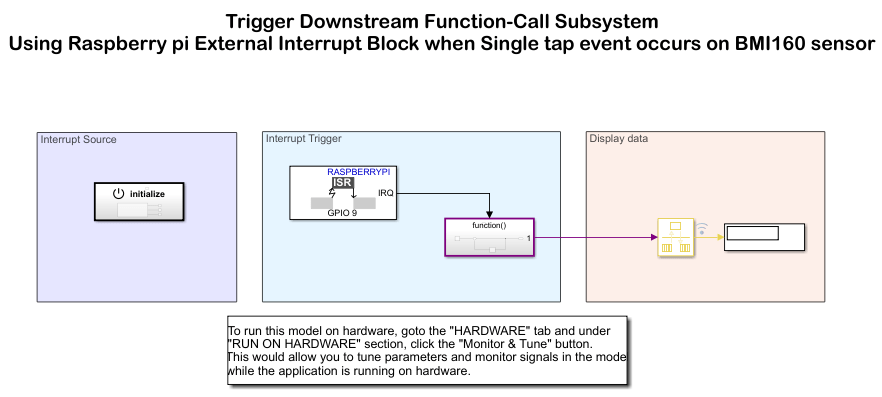
When interrupts are enabled use external interrupt block and develop respective function call subsystem.
Ports
Output
Parameters
Version History
Introduced in R2021b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)