Simulink ベースのステートに対する変数のマッピング
周期的ダイナミクスと連続時間ダイナミクスを切り替えるシステムをモデル化するには、Simulink® ベースのステートを使用します。詳細については、ステートとしての Simulink サブシステムを参照してください。
Simulink ベースのステート内にあるサブシステムの入力端子と出力端子には、Stateflow® 内の、入力端子と出力端子と同じ名前をもつ入力と出力を使用してアクセスできます。ライブラリから Enabled Subsystem と Action Subsystem をコピーして貼り付けることによって作成された Simulink ベースのステートの場合は、[未定義のシンボルを解決] ボタンをクリックして、Simulink の入力端子と出力端子を Stateflow の入力と出力に自動的にマッピングします。入力端子と出力端子の作成を参照してください。
使用しているリンクされた Simulink ベースのステートで、入力端子と出力端子の名前が Stateflow チャートの入力と出力と異なる場合は、変数が正しくマッピングされていることを必ず確認しなければなりません。これらのマッピングは、[プロパティ インスペクター] か、[マッピング] ダイアログ ボックスから変更できます。
Simulink ベースのステートでの変数のマッピング
マッピングのダイアログ ボックスを開くには、Simulink ベースのステートを選択します。[Simulink ステート] タブで [マッピング] をクリックします。
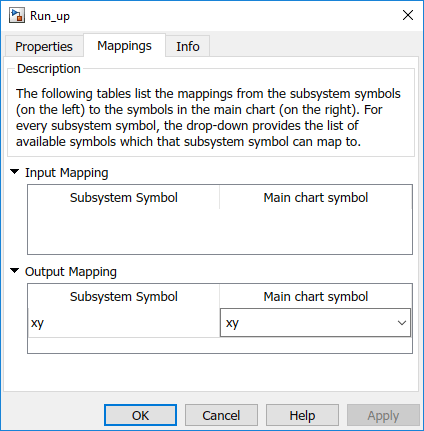
[Input マッピング] から、Simulink サブシステムの入力端子にマッピングする親チャートの入力を指定できます。
[Output マッピング] から、Simulink サブシステムの出力端子にマッピングする親チャートの出力を指定できます。
メモ
Stateflow チャートのローカル データを Simulink ベースのステート内のデータにマッピングすることはできません。