バッテリー バックアップ付きのスタンドアロンのソーラー PV DC 電力システム
この例では、バッテリー バックアップ付きのスタンドアロン太陽光発電 (PV) DC 電力システムの設計を説明します。この例では、次の方法を学習します。
接続負荷のプロファイルおよび利用可能な太陽光エネルギーに基づいて必要なバッテリー定格を選択。
直列接続されたストリングの数とストリングあたりのパネル数の観点から、パネルの配置方法を決定。
PI コントローラーの適切な比例ゲイン
 と位相進み定数
と位相進み定数  を選択。
を選択。
ソーラー PV とバッテリー ストレージはいずれもスタンドアロンの負荷をサポートします。負荷は一定の DC 出力に接続されます。ソーラー PV システムは、最大電力点追従 (MPPT) モードと軽減電圧制御モードの両方で動作します。バッテリー マネジメント システム (BMS) では双方向の DC-DC コンバーターを使用します。
スタンドアロンの PV システムには、太陽放射照度、太陽光発電量、接続負荷、バッテリーの SOC、バッテリーの最大充電量、および放電時の電流の制限に基づいて、6 つの標準動作モードが必要です。
ソーラー PV システムの最大電力点 (MPP) に追従するには、次の 2 つの MPPT 手法から選択できます。
Incremental Conductance (INC)
摂動と観測 (P&O)
毎日の平均接続負荷プロファイル、領域の 1 日あたりの利用可能な平均太陽エネルギー (kWhr)、ソーラー PV システムの動作温度、自律運転日、バッテリー再充電時間、出力 DC 電圧、およびソーラー パネルの仕様を指定できます。この例では、ソーラー パネル メーカーのデータを使用して、指定した発電容量の提供に必要な PV パネルの数を特定します。
 という形式の PI コントローラーにより、ソーラー PV と BMS が制御されます。
という形式の PI コントローラーにより、ソーラー PV と BMS が制御されます。
この例では、以下を使用します。
スタンドアロンの PV システム全体を設計する MATLAB® ライブ スクリプト。
システムの制御ロジックを設計/シミュレートする Simulink®。
電源回路をシミュレートする Simscape™。
監視制御ロジックを実装する Stateflow®。
スタンドアロンの PV DC 電力システム モデル
スタンドアロンの PV DC 電力システムを設計するスクリプトを開くには、MATLAB コマンド ウィンドウで、「edit 'SolarPVDCWithBatteryData'」と入力します。
バッテリーおよびソーラー PV プラントのパラメーターは次のとおりです。
*********************************************************************************************** **** For the Given Stand-Alone PV System, Battery Sizing Parameters **** *********************************************************************************************** *** Calculated amphr of the battery = 542.91 Ahr *** Battery nominal voltage = 78 V *** Battery voltage at 80% discharge = 70.20 V *** Number of required battery cell = 39.00 *** Average discharge current = 4.28 A *********************************************************************************************** *********************************************************************************************** **** For the Given Solar Panel, PV Plant Parameters **** *********************************************************************************************** *** Required PV Power rating = 9.36 kW *** Minimum number of panels required per string = 8 *** Maximum number of panels connected per string without reaching maximum voltage = 10 *** Minimum power rating of the solar PV plant = 1.80 kW *** Maximum power possible per string without reaching maximum DC voltage = 2.25 kW *** Actual number of panels per string = 8 *** Number of strings connected in parallel = 5 *** Actual solar PV plant power = 9.01 kW *********************************************************************************************** *********************************************************************************************** **** Battery Charging/Discharging Parameters **** *********************************************************************************************** Reference battery charging current = 45.24 A Maximum battery charging current = 128.29 A Maximum battery discharging current = 64.14 A Maximum battery charging Power = 10.01 kW Maximum battery discharging Power = 5.00 kW ***********************************************************************************************

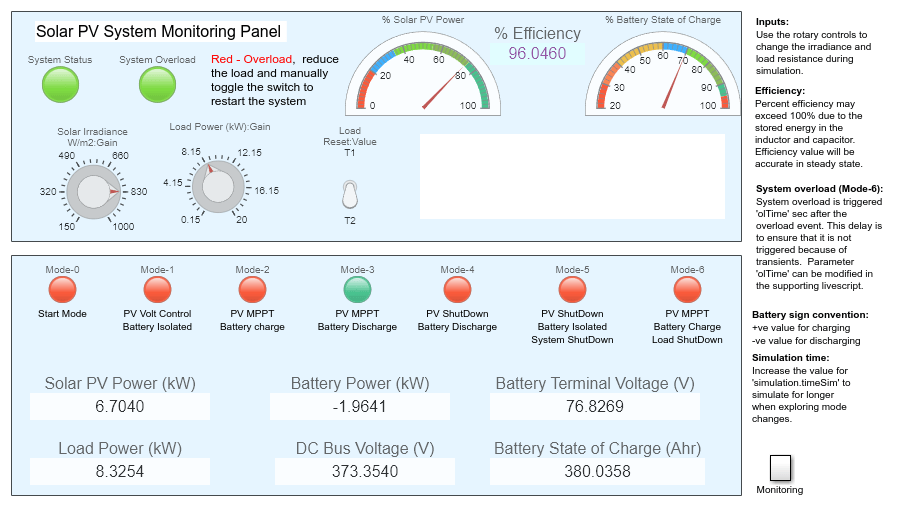
スタンドアロンのソーラー PV DC 電力システムの監視パネル
この例では、Simulink Dashboard 機能を使用して、すべてのリアルタイム システム パラメーターを表示します。シミュレーション中は、監視パネルのダッシュボード ノブを回して、太陽放射照度と負荷を変更します。これらのパラメーターを変更することにより、PV システムで動作モードがどのように切り替わるかを観察できます。
Solar Plant サブシステム
Solar Plant サブシステムは、ソーラー パネルを並列接続したストリングを含むソーラー プラントをモデル化します。ソーラー パネルは、Simscape Electrical ライブラリの Solar Cell ブロックを使用してモデル化されます。直列接続されたソーラー パネル ストリングの数を推定するために、この例では、DC 母線からの出力電圧、および温度と放射照度に依存する開回路電圧を使用します。並列接続されたソーラー パネル ストリングの数を推定するために、この例ではプラントの電力定格を使用します。複数のパネルを接続すると、モデル内の要素数が増えるため、シミュレーション速度が低下します。すべてのソーラー パネルで放射照度と温度が一定であると仮定して、Solar Panel サブシステムでは、制御された電流源と電力源を使用してソーラー要素の数を削減しています。

最大電力点追従
この例では、バリアント サブシステムを使用して 2 つの MPPT 手法を実装します。摂動と観測 (P&O) の MPPT を選択するには、バリアント変数 MPPT を 0 に設定します。Incremental Conductance (INC) を選択するには、変数 MPPT を 1 に設定します。
中間昇圧 DC-DC コンバーター
この例では、昇圧 DC-DC コンバーターを使用してソーラー PV 電力を制御します。バッテリーがフル充電されていない場合、ソーラー PV プラントは最大電力点で動作します。バッテリーがフル充電されていて、負荷が PV 電力より小さい場合、ソーラー PV は定出力の DC 母線電圧制御モードで動作します。

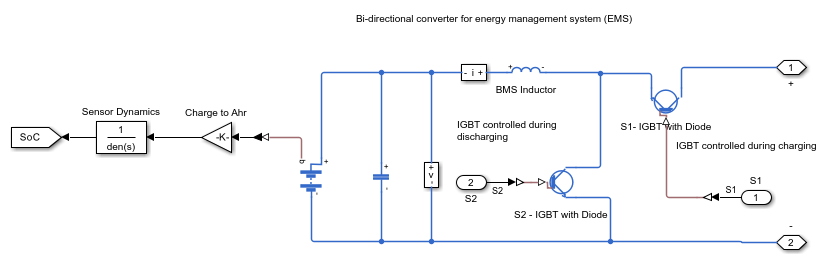
バッテリー マネジメント システム (BMS)
バッテリー マネジメント システムでは双方向の DC-DC コンバーターを使用します。バッテリーは降圧コンバーター構成と昇圧コンバーター構成によってそれぞれ充電、放電されます。バッテリーの性能と寿命を向上させるために、バッテリー バックアップ付きのシステムにはバッテリーの充電時と放電時の電流に上限があります。この例では、バッテリーが負荷に対して供給し、ソーラー PV 源から吸収することのできる最大電力量に制限を設定します。この例では、最大充電電力は、標準的なテスト条件におけるソーラー プラントの容量と等しくなります。この最大充電電力では、指定したバッテリー再充電時間よりも短時間でバッテリーを再充電できます。
この例では、充電操作と放電操作に別々のコントローラーを使用します。BMS コントローラーには、外側の電圧ループと内側の電流ループがあります。
監視制御 (モード制御) パラメーター
この例のスタンドアロンの PV システムは 7 つの動作モードで構成されています。これらのモードは、DC 母線電圧、太陽放射照度、およびバッテリーの SOC に基づいて選択されます。この例では、DC 母線電圧レベルを、負荷の不均衡を検出するための判断基準として使用します。DC 母線電圧が  より大きい場合、システムの発電量が負荷の需要より多くなっています。DC 母線電圧が
より大きい場合、システムの発電量が負荷の需要より多くなっています。DC 母線電圧が  より小さい場合、負荷の需要がシステムの発電量より多くなっています。
より小さい場合、負荷の需要がシステムの発電量より多くなっています。
DC 母線電圧レベル  、太陽放射照度
、太陽放射照度  、およびバッテリーの SOC
、およびバッテリーの SOC  を使用して、適切な動作モードが決定されます。
を使用して、適切な動作モードが決定されます。
スタンドアロンの PV DC システムの動作モードは次のとおりです。
モード 0 - 開始モード (既定のシミュレーション開始モード)
モード 1 - PV は出力電圧制御、バッテリーはフル充電で絶縁
モード 2 - PV は最大電力点、バッテリーは充電中
モード 3 - PV は最大電力点、バッテリーは放電中
モード 4 - 夜間モード、PV はシャットダウン、バッテリーは放電中
モード 5 - システム全体がシャットダウン
モード 6 - PV は最大電力点、バッテリーは充電中、負荷は切断
Stateflow のモード制御ブロック線図

シミュレーション出力
