このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
静的同期直列補償装置
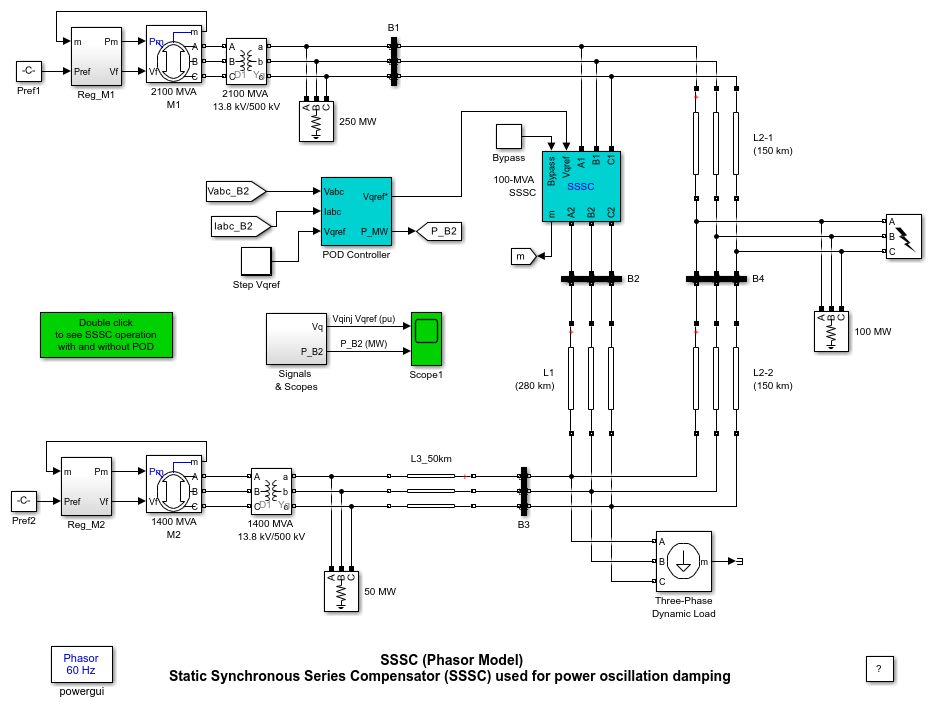
この例では、電力動揺の減衰に使用する静的同期直列補償装置 (SSSC) を示します。
Pierre Giroux and Gibert Sybille (Hydro-Quebec)
説明
静的同期直列補償装置 (SSSC) は主要な FACTS デバイスの 1 つで、伝送線路と直列に接続された電圧源コンバーターと変圧器で構成されています。SSSC は線電流と直交する可変振幅の電圧を供給し、それにより誘導性または容量性のリアクタンスをエミュレートします。線路と直列関係にあるこのエミュレートされた可変リアクタンスは、伝送される電力に影響を与えることができます。SSSC は三相故障の後に電力網で発生する電力動揺を減衰させるために使用します。
電力網は 2 つの発電サブステーションと、母線 B3 における 1 つの主要な負荷センターで構成されています。1 つ目の発電サブステーション (M1) の定格値は 2100 MVA で、350 MVA のマシン 6 台を表しています。もう 1 つの発電サブステーション (M2) の定格値は 1400 MVA で、350 MVA のマシン 4 台を表しています。約 2200 MW の負荷センターは、動的負荷モデルを使用してモデル化されます。このモデルでは、負荷によって吸収される有効電力と無効電力はシステム電圧の関数です。発電サブステーション M1 は 2 つの伝送線路 L1 および L2 によりこの負荷に接続されています。L1 の長さは 280 km です。L2 は 150 km ずつの 2 つのセグメントに分けられており、送電線の中間点で三相故障のシミュレーションを (故障ブレーカーを使用して) 実行できるようになっています。発電サブステーション M2 も 50 km の送電線 (L3) によりこの負荷に接続されています。SSSC がバイパスされる場合、この主要負荷へと流れる電力は、L1 で 664 MW (母線 B2 で測定)、L2 で 563 MW (B4 で計測)、L3 で 990 MW (B3 で計測) となります。
SSSC は母線 B1 に配置され、送電線 L1 と直列になっています。定格値は 100 MVA で、定格システム電圧の 10% まで供給することができます。この SSSC は、一般的な 3 レベル PWM SSSC のフェーザ モデルです。[SSSC] ダイアログ ボックスを開いて [Display Power data] を選択すると、モデルが表している SSSC の DC リンク定格電圧は 40 kV で、375 uF 相当の静電容量をもつことがわかります。AC 側では、等価インピーダンスの合計は 100 MVA で 0.16 pu となります。このインピーダンスは、変圧器の漏れリアクタンスと、実際の PWM SSSC の IGBT ブリッジの位相リアクトルを表しています。SSSC により供給される電圧指令値は通常、出力が SSSC の Vqref 入力に接続されている POD (電力動揺減衰) コントローラーによって設定されます。POD コントローラーは有効電力測定システム、一般ゲイン、ローパス フィルター、ウォッシュアウト ハイパス フィルター、進み補償器、出力制限器により構成されています。POD コントローラーへの入力は、B2 での母線電圧と L1 を流れる電流です。コントローラーの構造を確認するには、マスク内を表示します。
シミュレーション
1. SSSC の動的応答
まず、モデルの動的応答を確認します。"Step Vqref" ブロック (POD コントローラーの "Vqref" 入力 に接続されている赤色のタイマー ブロック) を開きます。このブロックは、基準電圧 Vqref を次のように変更するようプログラムしなければなりません。まず、Vqref を 0 pu に設定します。t = 2 秒で Vqref は -0.08 pu (SSSC 誘導性) に低下し、t = 6 秒で Vqref は 0.08 pu (SSSC 容量性) に上昇します。POD Controller ブロックをダブルクリックして、POD ステータス パラメーターを [オフ] に設定します。これにより POD コントローラーが無効になります。また、故障ブレーカーがシミュレーション中に動作しないようにしてください ([Phase A Fault]、[Phase B Fault]、[Phase C Fault] パラメーターを選択しないようにします)。
シミュレーションを実行して Scope1 を確認します。最初のグラフには Vqref 信号 (マゼンタのトレース) が、SSSC により供給された電圧の測定値と共に表示されます。2 番目のグラフには、母線 B2 で測定された送電線 L1 での有効電力の流れ (P_B2) が表示されます。SSSC 制御器は基準信号 Vqref によく追従していることがわかります。供給された電圧に応じて、送電線上の電力潮流は 575 ~ 750 MW の範囲で変動します。実際のシステムでは、基準信号 Vqref の変動は通常ずっとゆっくりとしたものになります。これは、伝送される電力 (P_B2 信号) に見られる動揺を回避するためです。SSSC ブロックをダブルクリックして、[Display Control parameters] を選択します。[Maximum rate of change for Vqref (pu/s)] パラメーターを 3 から 0.05 に変更します。シミュレーションを再実行します。有効電力での電力動揺が極めて小さくなります。
2. SSSC での電力動揺の減衰
次に、POD 制御がある場合とない場合の SSSC の動作を比較します。"Step Vqref" ブロックを開き、時間ベクトルに 1000 を乗じて Vqref の変動を無効にします。故障ブレーカーをダブルクリックして [Phase A Fault]、[Phase B Fault]、[Phase C Fault] パラメーターを選択し、三相故障のシミュレーションを実行します。遷移時間は [ 20/60 30/60]+1 に設定します。これは、故障が 1.33 秒で適用され、10 サイクルの間継続することを示しています。シミュレーションを実行して、三相故障の後に発生する L1 送電線の電力動揺 (Scope1 の 2 番目のグラフ) を観察します。
次に、POD コントローラーが動作中の状態で 2 番目のシミュレーションを実行します。POD Controller ブロックをダブルクリックして、POD ステータス パラメーターを [オン] に設定します。シミュレーションを開始します。もう一度 Scope1 の 2 番目のグラフ (P_B2 信号) を見ると、POD コントローラーを伴った SSSC は、電力動揺を減衰させる効果的ツールであることがわかります。POD 制御を伴う場合と伴わない場合の SSSC の動作を比較した図を表示するには、モデルの右下にある青色のブロックをダブルクリックします。