連続伝導モードのプッシュプル降圧コンバーター
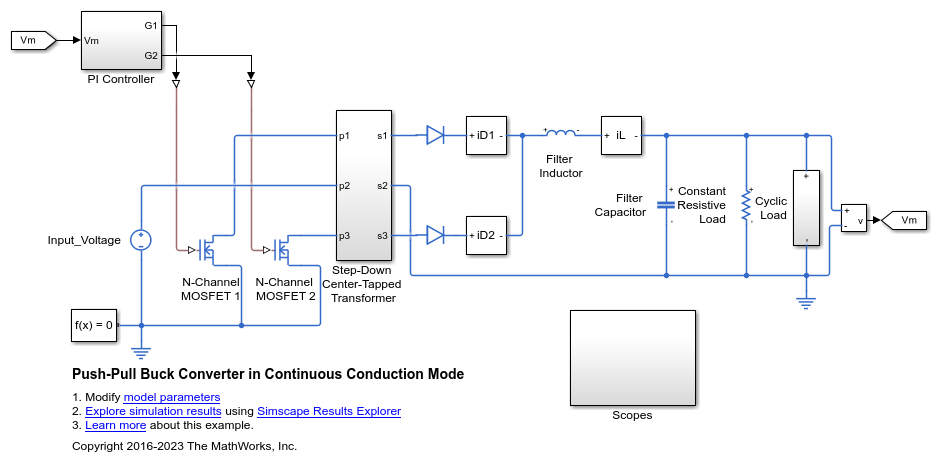
この例では、プッシュプル降圧コンバーターの出力電圧を制御する方法を説明します。インダクタを流れる電流がゼロになることはありません。そのため、この DC-DC コンバーターは連続伝導モード (CCM) で動作します。定格出力電圧への変換と維持のために、PI Controller サブシステムでは単純な積分制御を使用します。起動時に、基準電圧が目的の出力電圧まで上昇します。
コンバーターは次の場合にのみ CCM で動作します。
 ,
,
ここで、
 .
.
 .
.
 はフィルターのインダクタンス。
はフィルターのインダクタンス。
 は負荷抵抗。
は負荷抵抗。
 は各 MOSFET のスイッチング周期。つまり、
は各 MOSFET のスイッチング周期。つまり、 がスイッチング周波数として、
がスイッチング周波数として、 。
。
 は、各 MOSFET のゲートに対する PWM 入力のデューティ比。つまり、
は、各 MOSFET のゲートに対する PWM 入力のデューティ比。つまり、 が MOSFET のオン時間として、
が MOSFET のオン時間として、 。
。
モデルを開く
設計パラメーターの指定
システムは、1000 W の全負荷電力容量で 80 V の出力電圧を生成し、維持する必要があります。入力電圧は 400 V で、変圧器の巻数比は 2 です。全負荷には、定負荷と周期的負荷が含まれます。'PushPullBuckCCMData.m' スクリプトは、設計パラメーターを MATLAB® ワークスペースの変数として定義します。
開ループのデューティ比の計算
デューティ比は、入力電圧、巻数比および目的の出力電圧によって異なります。
定負荷抵抗の決定
フィルター インダクタンスの計算
コンバーターの入出力仕様に基づいてインダクタンスの値を選択します。インダクタンスの値は、コンバーターの入出力仕様によって異なります。この例では、コンバーターは、全負荷電力の 20 ~100% に対して CCM で動作するよう求められます。下限条件において電力が全負荷電力の 20% である場合、平均負荷電流は、全負荷平均電流 I_fl_average の 20% になります。下限条件における各サイクルの終了時点で、インダクタの電流はゼロになります。この時点のインダクタのリップル電流 del_I は、平均出力負荷電流の 2 倍、つまり全負荷平均出力電流の 40% です。
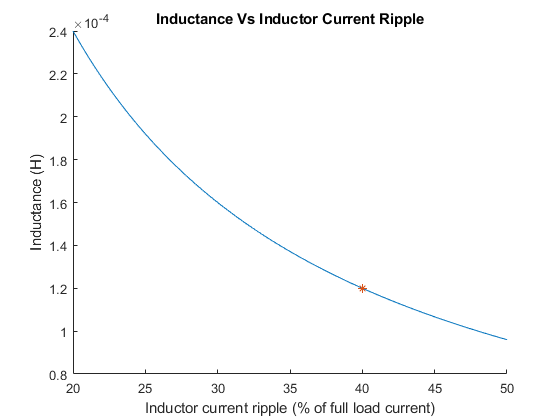
インダクタ電流リップルに対するインダクタンスのプロット
次のプロットを生成し、フィルター インダクタンスがインダクタのリップル電流にどのように関係しているかを確認します (全負荷電流のパーセント比として表す)。この例では、40% の位置にあるマーカーは 1.2e-04 H のインダクタンスに対応しています。
フィルターの静電容量の選択
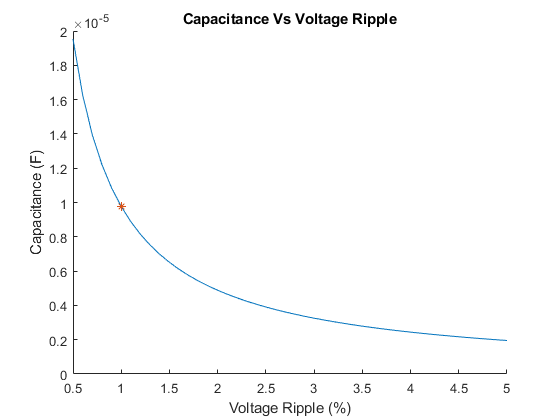
電圧リップルに対する静電容量のプロット
次のプロットを生成し、出力電圧リップルを制限するための静電容量が設計パラメーターによってどのように変わるかを確認します。この例では、出力電圧リップル 1% の位置にあるマーカーは 9.766e-06 F の静電容量に対応しています。
シミュレーションの実行
シミュレーション結果の表示
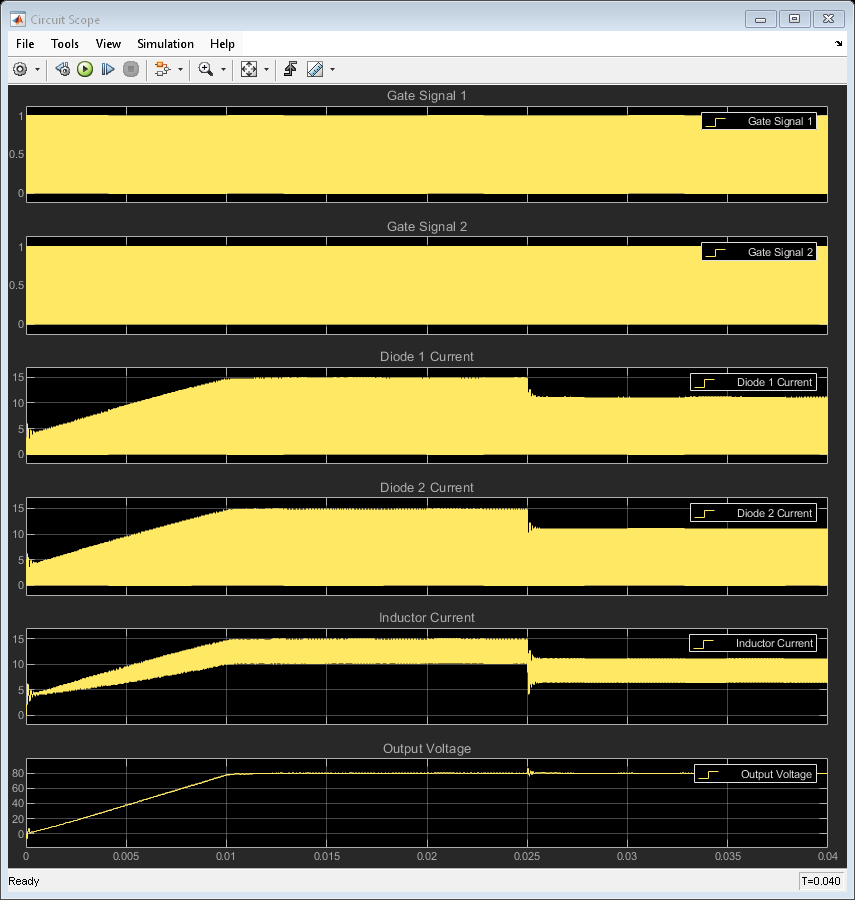
シミュレーション中またはシミュレーション後に結果の概要を表示するには、モデル ウィンドウから Circuit Scope ブロックを開くか、MATLAB コマンド プロンプトで「open_system('PushPullBuckCCM/Scopes/Circuit Scope');」と入力します。
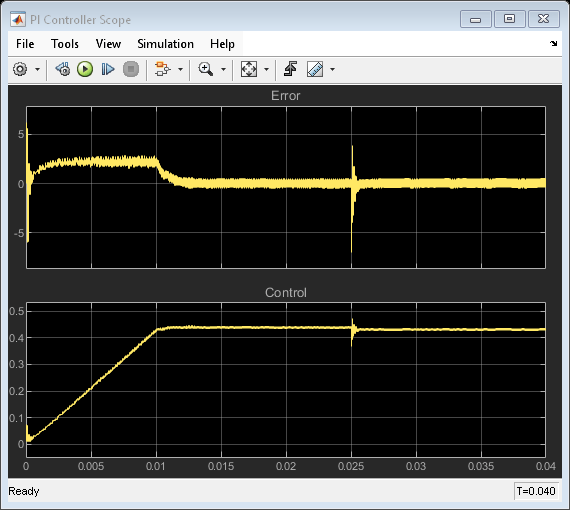
シミュレーション中またはシミュレーション後に制御と誤差のデータを表示するには、モデル ウィンドウから PI Controller Scope ブロックを開くか、「open_system('PushPullBuckCCM/Scopes/PI Controller Scope');」と入力します。
シミュレーション後に Simscape™ 結果エクスプローラーを使用してログに記録された Simscape データを表示するには、「sscexplore(simlog_PushPullBuckCCM);」と入力します。