このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
6/4 スイッチト リラクタンス モーターの回転数制御
この例では、三相 6/4 スイッチト リラクタンス モーター (SRM) の回転数制御を説明します。
説明
スイッチト リラクタンス モーターは、リラクタンス トルクにより駆動される AC モーターです。その回転子に巻線や永久磁石はありません。一般的な SRM のタイプには、三相 6/4 (6 は固定子極の数、4 は回転子極の数)、四相 8/6、五相 10/8 があります。SRM は、回転子の位置に基づいて適切な固定子の相を励磁するパワー エレクトロニクス コンバーターに接続されます。
電気モデル
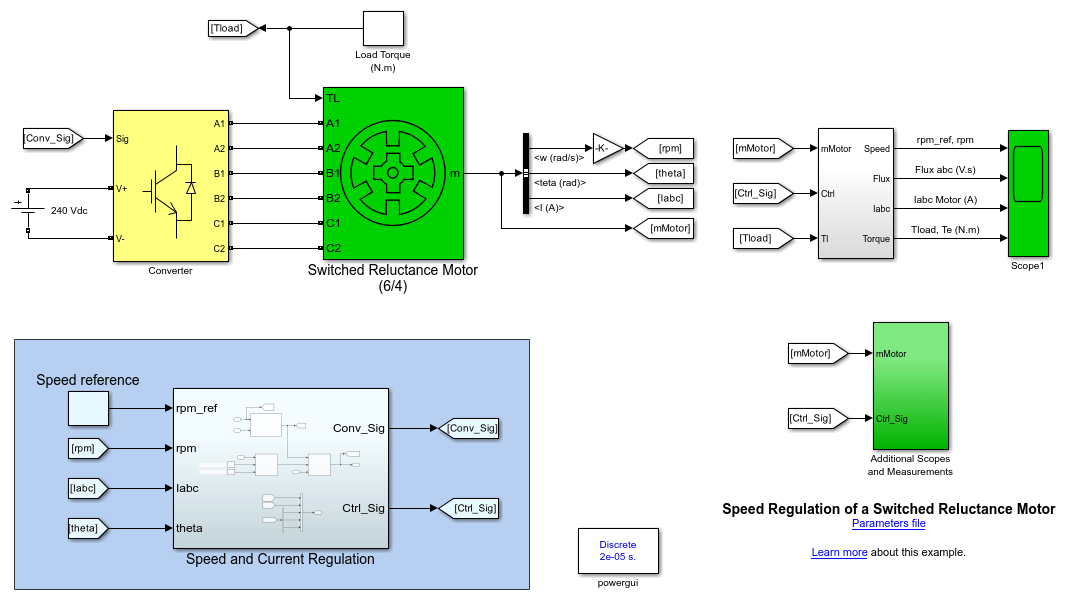
DC 母線は理想的な 240 V DC 電圧源としてモデル化され、三相 6/4 SRM につながれたパワー エレクトロニクス コンバーターに接続しています。このコンバーターは、3 つの単相フルブリッジ コンバーターを使用してモデル化されます。フルブリッジ コンバーターは、正または負の電圧を固定子巻線に印加することにより、励磁または励磁停止をそれぞれ行います。
この例では、SRM モデルの汎用モデル タイプを使用します。電気的な部分は、複数の磁化曲線で構成される磁化特性と、磁化曲線から計算されたトルク特性に基づく、非線形モデルによって表されます。磁化特性は非線形関数および指定したモーター パラメーターを使用して計算されます。Switched Reluctance Motor ブロックの [Plot magnetization curves] パラメーターをオンにして [適用] をクリックすると、磁化曲線 (固定子電流と回転子位置の関数としての鎖交磁束を含む) を可視化できます。
制御システム
この SRM 制御システムの主要コンポーネントは以下のとおりです。
速度調整器 - この調整器は実際のモーター回転数を回転数指令値と比較します。モーターを加速する必要がある場合、より大きいトルクを発生させるために、調整器は電流指令値 (Iref) を上げます。逆にモーター回転数が指令値より高い場合、調整器は Iref を下げます。
Commutation Logic ブロック - このブロックは、回転子の位置 (SRM モデルからのシータ信号で表される) と点弧角および消弧角に基づき、トルク生成用の適切な転流シーケンスを生成するための制御信号を生成します。
電流制御器 - 望ましい指令電流 Iref と転流論理信号に基づき、三相のそれぞれについて電流指令値が作成されます。各電流指令値はその後、対応する測定された固定子電流と比較されます。その結果の誤差が正のヒステリシス バンド値を超えると、導通命令が適切なフルブリッジ コンバーターに送られます。その後、コンバーターは正の電流を巻線に流すために正の電圧を固定子巻線に印加します。環流期間 (パルスがない場合) 中は、負の電圧が巻線に印加され、蓄積されたエネルギーがダイオードを介して DC 電源に返されます。
次の図は、3 つの回転子位置についての転流シーケンスを示しています。
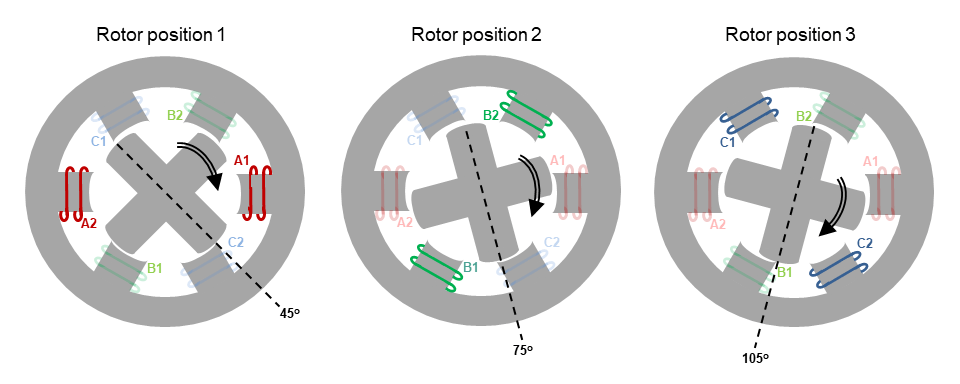
回転子位置 1 では、正の電圧が巻線 A1 および A2 に印加されます。その結果生成される磁場により、新たに励磁された固定子極と並ぶよう回転子極に働きかけるリラクタンス トルクが作成されます。
モーターが回転子位置 2 に達すると、巻線 A1 および A2 の励磁が停止し、巻線 B1 および B2 が励磁されることにより、回転子は時計回りの回転を続けます。このアクションで回転子が時計回りの回転を続けるのは、回転子が巻線 B1 および B2 と一直線に並ぼうとするためです。
最後に、モーターが位置 3 に達すると、巻線 B1 および B2 の励磁は停止し、巻線 C1 および C2 が励磁されます。回転子には 4 つの極があるため、このシーケンスは 90 度ごとに繰り返されます。
この例では、点弧角および消弧角 (固定子巻線 A1 および A2 を基準とする) はそれぞれ 45 度と 75 度で一定に保たれます。A、B、C の各相が励磁されるときの回転子角度は、A 相の軸に対しそれぞれ 45 度、75 度、105 度です。
シミュレーション
シミュレーションを実行し、Scope1 というブロックで波形を観察します。モーターは 15 N.m の負荷トルクを伴い、0 ~ 1500 rpm の回転数で動作します。0.15 秒で、負荷トルクが 75 N.m に増加します。モーター回転数を 1500 rpm で維持するために、制御システムは指令電流を増大します。0.3 秒で、回転数指令値が 2500 rpm に跳ね上がります。目的の回転数に到達するよう、制御システムはモーターの電流を増やして一時的に大きなトルクを生成します。
リアルタイム シミュレーション
Simulink Real-Time と Speedgoat ターゲット コンピューターがある場合は、このモデルをリアルタイムで実行できます。
[コンフィギュレーション パラメーター] ウィンドウを開いて (または "Ctrl+E" を押す)、[コード生成] をクリックし、[システム ターゲット ファイル] を Simulink Real-Time モデルの STF に設定します。
ターゲットに接続し、[リアルタイム] タブの [ターゲットで実行] をクリックします。
これにより、ターゲット上で自動的にモデルが作成、展開および実行されます。ターゲットのストリーミング帯域幅に応じて、ターゲットからホスト コンピューターにリアルタイムで転送される信号数を減らさなければならないことがあります。
参考文献
Knight, Andy. Electrical Machines Switched Reluctance Motors. カルガリー大学。
外部 Web サイト
Wikipedia. "Switched reluctance motor." 2020 年 10 月 28 日閲覧。