このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
表面磁石型永久磁石同期モーターのベクトル制御
この例では、ベクトル制御 (FOC) を使用した表面磁石型永久磁石同期モーター (PMSM) の回転数調整を説明します。
説明
PMSM は AC 同期モーターであり、永久磁石を回転子の表面に取り付けたもの (表面磁石型 PMSM) と回転子に埋め込んだもの (埋め込み磁石型 PMSM) があります。BLDC モーターの逆起電力は台形波状ですが、PMSM の逆起電力は正弦波状です。
PMSM モーターの制御には通常、ベクトル制御スキームを使用し、正弦波電流を供給します。
電気モデル
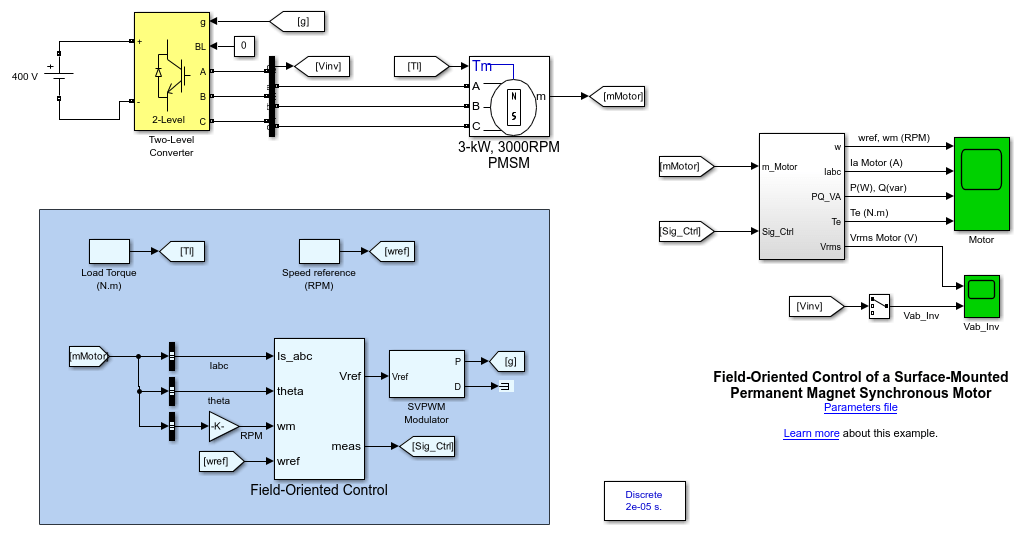
DC 母線は理想的な 400 V DC 電圧源としてモデル化され、三相 2 レベル コンバーターに接続しています。このコンバーターは、3 kW、3000 rpm の PMSM モーターの回転数調整に適切な三相電圧を生成します。
コンバーターは、空間ベクトル PWM 変調器への電圧指令値を生成する FOC コントローラーで制御されます。
ベクトル制御理論
FOC は、モーター磁束の空間ベクトルに固定されている d-q 座標の基準座標系を使用して、モーター磁束とトルク間の分離を実現する制御スキームです。したがって、これらはそれぞれ固定子の d 軸電流と q 軸電流によって個別に制御できます。
磁石によって発生した磁束が、固定子電流によって発生した固定子磁束と垂直であるときにトルクが最大になります。ベクトル制御スキームでは、最大トルクが発生するように、これら 2 つの磁束がなす角度を 90 度に維持します。
モーターによって生ずるトルクは、以下で与えられます。
![$$T_e = \frac{3}{2} \: p \:[ \lambda \: i_{q} + (L_{d}-L_{q})\: i_{d}\: i_{q}]$$](../../examples/simscapeelectricalsps/win64/SurfaceMountedPMSMFieldOrientedControlExample_eq17592908402323632901.png)
ここで、
 は極対数。
は極対数。 は固定子巻線内の永久磁石による誘起磁束。
は固定子巻線内の永久磁石による誘起磁束。 と
と  は "d" 軸と "q" 軸のインダクタンス。
は "d" 軸と "q" 軸のインダクタンス。 と
と  は "d" 軸と "q" 軸の固定子電流。
は "d" 軸と "q" 軸の固定子電流。
式は回転子の基準座標系 (dq 座標系) で表されており、回転子の基準座標系のすべての数量は固定子に関するものである点に注意してください。
モーターの永久磁石は回転子の表面に取り付けられているため、d 軸と q 軸のインダクタンスは同じ値になります (この例では Ld = Lq)。これにより、上記の式は次のように簡略化できます。
![$$T_e = \frac{3}{2} \: p \:[ \lambda \: i_{q}]$$](../../examples/simscapeelectricalsps/win64/SurfaceMountedPMSMFieldOrientedControlExample_eq13879717713436589008.png)
この新しい式は、d 軸の電流成分 Id がトルクに影響を与えないことを示します。この結果、モーターのトルクを固定子の Iq 成分で制御できます。
ベクトル制御システム
回転子の位置 (モーターのモデル内では信号 theta で表される) に基づき、測定された三相固定子電流が、回転子の基準座標系の d-q 座標に変換されます。
モーター回転数  と回転数指令値
と回転数指令値  が速度調整器に供給され、電流指令値
が速度調整器に供給され、電流指令値  が生成されます。速度調整器の役割は、生成トルクを増減してモーターを加速または減速し、モーター回転数を回転数指令値と等しく保つことです。
が生成されます。速度調整器の役割は、生成トルクを増減してモーターを加速または減速し、モーター回転数を回転数指令値と等しく保つことです。
電流指令値 および電流指令値  (弱め界磁の不要時にこれらはゼロに設定) が、電流制御器に供給されます。制御器は測定電流と指令電流を処理して、三相基準信号を生成します。信号は、モーター インバーター用のパルスを生成する PWM 変調器に接続されています。変調器は、パルス平均化を使用する空間ベクトル PWM メソッドと、8 kHz のスイッチング周波数を使用します。
(弱め界磁の不要時にこれらはゼロに設定) が、電流制御器に供給されます。制御器は測定電流と指令電流を処理して、三相基準信号を生成します。信号は、モーター インバーター用のパルスを生成する PWM 変調器に接続されています。変調器は、パルス平均化を使用する空間ベクトル PWM メソッドと、8 kHz のスイッチング周波数を使用します。
シミュレーション
シミュレーションを実行し、Scope ブロックで波形を観察します。モーターは急速に指令回転数の 2000 rpm に到達します。回転数指令値を -2800 rpm に設定することにより、0.25 秒の時点でモーターが逆回転します。この新しい指令値に従うために、制御システムは多大な負のトルクを発生します。減速中に有効電力が DC 電源に伝達された点に注意してください。0.65 秒で、負の負荷トルク -8 N.m がモーターに加えられます。モーターの回転数を -2800 rpm に維持するために、制御システムが指令電流を変化させて負のトルク約 -10 N.m を発生させます。
リアルタイム シミュレーション
Simulink® Real-Time™ と Speedgoat® ターゲット コンピューターがある場合は、このモデルをリアルタイムで実行できます。
[コンフィギュレーション パラメーター] ウィンドウを開いて (または "Ctrl+E" を押す)、[コード生成] をクリックし、[システム ターゲット ファイル] を Simulink Real-Time モデルの STF に設定します。
ターゲットに接続し、[リアルタイム] タブの [ターゲットで実行] をクリックします。
これにより、ターゲット上で自動的にモデルが作成、展開および実行されます。ターゲットのストリーミング帯域幅に応じて、ターゲットからホスト コンピューターにリアルタイムで転送される信号数を減らさなければならないことがあります。
参考文献
Cirrincione, M., M. Pucci, G. Vitale.Power Converters and AC Electrical Drives with Linear Neural Networks.CRC Press, 2012.