このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
地上輸送システムで使用する誘導モーター ドライブのベクトル制御
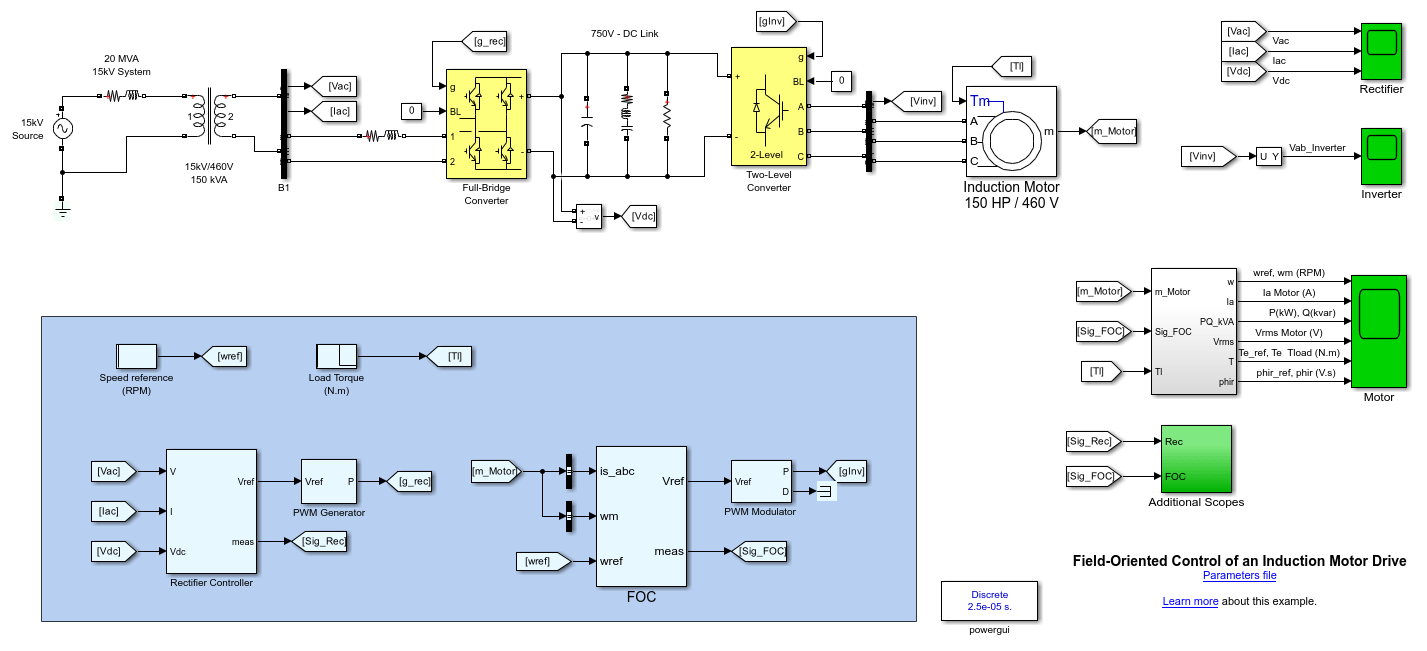
この例では、トロリー バスの牽引システム内にある可変速 AC ドライブの動作を説明します。
牽引システム
電気エネルギーは、15 kV、単相 60 Hz の架線から 15 kV/460 V の変圧器経由で供給されます。変圧器の 2 次側はパルス幅変調 (PWM) AC/DC フルブリッジ コンバーターに接続され、DC リンクに DC 電圧 750 V が生成されます。この電圧は、第 2 高調波 (120 Hz) に調整されたフィルターによってフィルター処理されます。DC リンクの電圧は、PWM 制御の三相 2 レベル コンバーターに接続されています。このコンバーターが、誘導モーターの可変速動作に必要な可変の電圧と周波数を発生させます。AC/DC コンバーターでは、制動時間中に電力潮流を反転させることができます。その際、バスの運動エネルギーは電気エネルギーに変換され、電力システムに再投入されます。さらに、この種のコンバーターでは、一定の力率での操作も可能です。
インバーターで電力供給される誘導モーター ドライブは、用途、求められる性能、コントローラー設計の複雑度に応じて、さまざまなスキームを使用して制御できます。よく使用されるスキームは、スカラー制御 (V/Hz 制御、開ループ磁束制御) やベクトル制御 (ベクトル制御、直接トルク制御) です。これらのスキームでは、モーター回転数は電源周波数を変更することによって制御されます。磁気飽和なしで最適なトルクを発生させるには、ノミナル値に近い一定のエア ギャップ磁束を維持し、電圧と周波数の比を保つ必要があります。この例では、ベクトル制御 (FOC) スキームを使用します。
ベクトル制御理論
FOC は誘導モーターの制御スキームであり、モーター磁束の空間ベクトルへとロックされている d-q 座標の基準座標系を使用して、モーター磁束とトルク間の分離を実現します。したがって、これらはそれぞれ固定子の d 軸電流と q 軸電流によって個別に制御できます。
ある時点における固定子と回転子の起磁力 (MMF)  および
および  を示す簡略図を考えます。
を示す簡略図を考えます。

固定子と回転子の三相巻線は、2 つの単一巻きの等価な巻線によって表現されています。MMF と は、電源周波数によって決まる同期角速度で回転します。図に示すように、結果の MMF  ( と のベクトル和) が、同期角速度で回転するモーター磁束を生成します。
( と のベクトル和) が、同期角速度で回転するモーター磁束を生成します。
モーターによって生ずるトルクは、以下で与えられます。

ここで、 は回転子の MMF、 は回転子の磁束、
は回転子の磁束、 は と のなす角度、
は と のなす角度、 はモーターの構造によって異なる定数です。この関係は、 が 90 度に等しいときに、発生するトルクが最大になることを示します。FOC 制御スキームの課題は、この角度を可能な限り 90 度近くに保ち (弱め界磁操作中を除く)、モーター磁束をノミナル値に維持することです。
はモーターの構造によって異なる定数です。この関係は、 が 90 度に等しいときに、発生するトルクが最大になることを示します。FOC 制御スキームの課題は、この角度を可能な限り 90 度近くに保ち (弱め界磁操作中を除く)、モーター磁束をノミナル値に維持することです。
以下の図は、FOC の原理を示しています。電流空間ベクトル  および
および  は、前の図の MMF および を表します。回転子の電流空間ベクトル が、モーター磁束を生成する磁化電流 ids と垂直であることに注目してください。
は、前の図の MMF および を表します。回転子の電流空間ベクトル が、モーター磁束を生成する磁化電流 ids と垂直であることに注目してください。

基準座標が適切に配置されています。固定子の d 軸電流 ids はモーター磁束と同じ直線上にあり、固定子の q 軸電流  はモーター磁束に垂直です。その結果、モーター磁束とトルクはそれぞれ、固定子電流成分
はモーター磁束に垂直です。その結果、モーター磁束とトルクはそれぞれ、固定子電流成分  と で個別に制御できます。
と で個別に制御できます。
図に示す磁束 は、固定子と回転子の電流空間ベクトルによってエア ギャップに発生した合計磁束  です。FOC 理論では、エア ギャップ磁束 の代わりに回転子磁束
です。FOC 理論では、エア ギャップ磁束 の代わりに回転子磁束  が使用されます。回転子磁束 はエア ギャップ磁束 に非常に近いものです。唯一の違いは、 には微小磁束
が使用されます。回転子磁束 はエア ギャップ磁束 に非常に近いものです。唯一の違いは、 には微小磁束  が含まれることです。 は回転子の漏れインダクタンスです。 は、
が含まれることです。 は回転子の漏れインダクタンスです。 は、 と
と  が成り立つように、回転座標系の "d" 軸上に留まるように制御されます。
が成り立つように、回転座標系の "d" 軸上に留まるように制御されます。
座標を変換するためにモーター磁束の位置  が必要であり、この位置は回転子角速度
が必要であり、この位置は回転子角速度  とすべり角周波数
とすべり角周波数  から生成されます。
から生成されます。

ここで、 は極対数です。すべり角周波数 と、指令電流
は極対数です。すべり角周波数 と、指令電流  および
および  を計算するには、モーターのモデルがコントローラー内に実装されている必要があります。
を計算するには、モーターのモデルがコントローラー内に実装されている必要があります。
は、固定子の指令電流 と、モーターのパラメーター  、 および
、 および  から次のように評価されます。
から次のように評価されます。

ここで、 は回転子の鎖交磁束、 は相互インダクタンス、 と は回転子の漏れインダクタンスと抵抗です。回転子の時定数は次のとおりです。
と は回転子の漏れインダクタンスと抵抗です。回転子の時定数は次のとおりです。

回転子の鎖交磁束は次のように計算されます。

固定子の "q" 軸指令値 は、トルク指令値  と回転子の鎖交磁束 から計算されます。
と回転子の鎖交磁束 から計算されます。

固定子の "d" 軸指令電流 は、鎖交磁束指令値  から得られます。
から得られます。

ベクトル制御
モーター回転数 と回転数指令値  が Speed Regulator ブロックに供給され、トルク指令値
が Speed Regulator ブロックに供給され、トルク指令値  が生成されます。速度調整器の役割は、定常状態ではモーター回転数を回転数指令値と等しく保ち、過渡時には迅速な動的応答を提供することです。
が生成されます。速度調整器の役割は、定常状態ではモーター回転数を回転数指令値と等しく保ち、過渡時には迅速な動的応答を提供することです。
計算された と の電流指令値は電流レギュレーターに供給されます。このレギュレーターは測定電流と指令電流を処理して、三相基準信号  を生成します。 の各信号は、モーター インバーターへのパルスを生成する PWM 変調器に接続されています。変調器は、パルス平均化を使用する空間ベクトル PWM メソッドと、2 kHz のスイッチング周波数を使用します。
を生成します。 の各信号は、モーター インバーターへのパルスを生成する PWM 変調器に接続されています。変調器は、パルス平均化を使用する空間ベクトル PWM メソッドと、2 kHz のスイッチング周波数を使用します。
整流器コントローラー
このコントローラーは DC リンク電圧を調整し、入力力率 1 を維持します。次の主要なブロックで構成されています。
PLL & Measurements システムは変圧器の二次電圧に同期します。二次電圧と電流が測定され、d-q 座標に変換されます。
Current Regulator (内側の制御ループ) は、Id 電流用と Iq 電流用の 2 つの PI コントローラーで構成されています。コントローラーの出力は Vd 信号と Vq 信号であり、これらは PWM 発生器の基準信号 Vref に変換されます。力率 1 を実現するために、Iq 指令値がゼロに等しく保たれます。Id 指令値は外側の電圧制御ループによって指定されます。
Voltage Regulator (外側の制御ループ) は DC リンク電圧を調整します。
基準信号 Vref は、フルブリッジ AC/DC 整流器へのパルスを生成する PWM 発生器に接続されています。この発生器は、パルス平均化を使用する搬送波ベースの PWM メソッドと、2340 (39*60) Hz のスイッチング周波数を使用します。
シミュレーション
シミュレーションを実行し、Scope ブロックで波形を観察します。道路の傾きの急激な変化をシミュレートするために、3.5 秒での時点で、負荷トルクを 400 N.m から 40 N.m に低減下し、回転数指令値を 1000 rpm から 750 rpm に低減します。トロリー バスは坂を下るため、誘導モーターによって運動エネルギーが電気エネルギーに変換されます。このときに、誘導モーターは発電機として動作します。このエネルギーは、DC リンクと、その時点でインバーターとして動作している単相コンバーターを経由して電力網に返されます。Scope ブロックの P(kW)、Q(kVar) のトレースで有効電力が反転している (3.5 秒時点で約 -25 kW) ことに注目してください。
リアルタイム シミュレーション
Simulink® Real-Time™ と Speedgoat® ターゲット コンピューターがある場合は、このモデルをリアルタイムで実行できます。
[コンフィギュレーション パラメーター] ウィンドウを開いて (または "Ctrl+E" を押す)、[コード生成] をクリックし、[システム ターゲット ファイル] を Simulink Real-Time モデルの STF に設定します。
ターゲットに接続し、[リアルタイム] タブの [ターゲットで実行] をクリックします。
これにより、ターゲット上で自動的にモデルが作成、展開および実行されます。ターゲットのストリーミング帯域幅に応じて、ターゲットからホスト コンピューターにリアルタイムで転送される信号数を減らさなければならないことがあります。