このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
誘導モーター ドライブの直接トルク制御
この例では、ヒステリシス ベースの直接トルク制御 (DTC) 手法を使用した、可変周波数 AC ドライブの回転数調整を説明します。
電気モデル
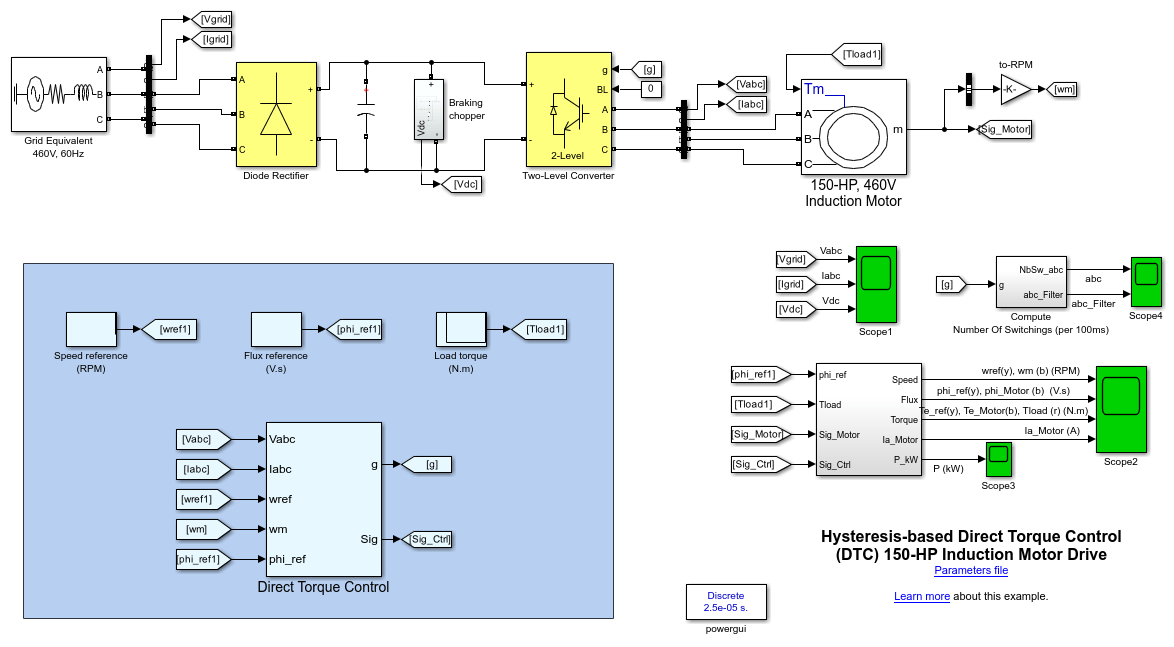
電気エネルギーは、460 V、60 Hz の送電網相当物に接続している三相 AC/DC ダイオード整流器により供給されます。DC 母線は三相 2 レベル コンバーターに接続されています。このコンバーターが、150 HP 誘導モーターの可変速動作に必要な可変の電圧と周波数を発生させます。さらに、減速時にモーターの運動エネルギーを消費するために、DC 母線にブレーキ チョッパーが接続されています。
インバーターで電力供給される誘導モーター ドライブは、用途、求められる性能、およびコントローラー設計の複雑度に応じて、さまざまな手法を介して制御できます。よく使用されるスキームは、スカラー制御 (V/Hz 制御、開ループ磁束制御) やベクトル制御 (ベクトル制御、直接トルク制御) です。この例では、ヒステリシス ベースの直接トルク制御 (DTC) 手法を使用します。
直接トルク コントローラー
直接トルク制御 (DTC) は、モーターの磁束とその電磁トルクを分離した状態で瞬時に制御できる制御手法です。トルクを直接制御することにより、静的および動的な回転数調整を正確に行うことができます。DTC サブシステムには次の主要コンポーネントがあります。
磁束とトルクの計算 - 固定子の鎖交磁束は固定子電圧を積分することで推定され、トルクは推定した磁束とモーター電流に基づいて計算されます。
速度調整器 - この調整器は実際のモーター回転数を回転数指令値と比較して、トルク指令値を生成します。
ヒステリシス制御 - 算出した磁束の大きさとトルクを指令値と比較します。その結果得られる磁束またはトルクの誤差が正または負のヒステリシス バンド値を超えた場合、誤差を修正するために制御信号が有効になります。
最適スイッチング - ヒステリシス制御および固定子鎖交磁束の位置により生成された制御信号に基づき、モーター インバーターへのパルスが生成されます。
以下の図は、鎖交磁束がセクター 0 にある場合に、最適な電圧ベクトルを判別するための手法を示しています。
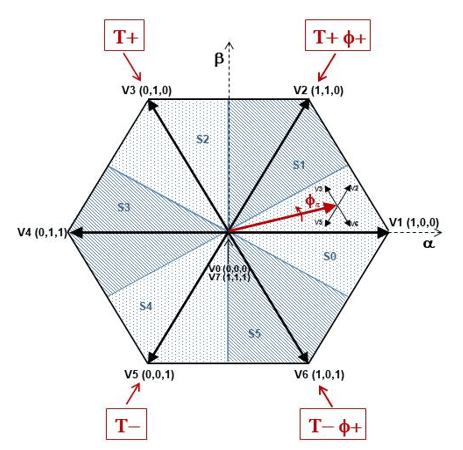
この図には 4 つのケースが示されています。
電磁トルクを増加させ、磁束をそのままにしておく必要がある場合は、V3 が選択されます。V3 電圧ベクトルを選択すると磁束の速度が上がり、これにより加速トルクが回転子に加えられ、磁束の大きさがわずかに小さくなります。
電磁トルクを増加させ、磁束を増加させる必要がある場合は、V2 が選択されます。V2 電圧ベクトルを選択すると磁束の速度がわずかに上がり、磁束の大きさが大きくなります。
電磁トルクを減少させ、磁束を増加させる必要がある場合は、V6 が選択されます。V6 電圧ベクトルを選択すると磁束の速度が下がり、これにより減速トルクが回転子に加えられ、磁束の大きさが大きくなります。
電磁トルクを減少させ、磁束をそのままにしておく必要がある場合は、V5 が選択されます。V5 電圧ベクトルを選択すると、減速トルクが回転子に加えられ、磁束の大きさがわずかに小さくなります。電圧ベクトル V1 と V4 はセクター 0 では選択されません。これら 2 つのベクトルを使用すると、目的の磁束値に対し非常に大きな悪影響が生じます。最後に、トルクと磁束をそのままにしておく場合は、ヌルの電圧ベクトル V0 または V7 が選択されます。
鎖交磁束ベクトルがセクター 1 に移動すると、選択される電圧ベクターはケース 1 では V4、ケース 2 では V3、ケース 3 では V1、ケース 4 では V6 となり、ベクトル V2 および V5 は使用されません。電圧ベクトルにおけるこの 60 度のシフトは、鎖交磁束ベクトルが新しいセクターに入るたびに発生します。
シミュレーション
シミュレーションを実行し、Scope2 で波形を観察します。最初、磁束指令値は 0.9 V.s に設定されています。
0.1 秒で、回転数指令値が 1500 RPM に設定されてモーターが加速し始めます。モーター回転数は回転数指令値に正確に追従し、指令値の最大変化率は 1200 rpm/s に制限されています。1.35 秒で、1500 RPM の指令値に到達します。
1.5 秒で、負荷トルク 500 N.m がモーターに加えられます。DTC 制御はモーター回転数を 1500 RPM に維持するよう動作します。
2 秒で負荷トルクが 50 N.m に減少し、2.5 秒で回転数指令値が 500 RPM に減少します。DC 母線の過電圧を防ぐために、ブレーキ チョッパーの働きによりモーターで発生する運動エネルギーが消費されていることを、Scope 1 で観察します。最後に、3.5 秒で、磁束指令値が 0.9 V.s から 1.0 V.s に上昇します。
リアルタイム シミュレーション
Simulink® Real-Time™ と Speedgoat ターゲット コンピューターがある場合は、このモデルをリアルタイムで実行できます。
[コンフィギュレーション パラメーター] ウィンドウを開いて (または "Ctrl+E" を押す)、[コード生成] をクリックし、[システム ターゲット ファイル] を Simulink Real-Time モデルの STF に設定します。
ターゲットに接続し、[リアルタイム] タブの [ターゲットで実行] をクリックします。
これにより、ターゲット上で自動的にモデルが作成、展開および実行されます。ターゲットのストリーミング帯域幅に応じて、ターゲットからホスト コンピューターにリアルタイムで転送される信号数を減らさなければならないことがあります。
参考文献
1. M. Cirrincione, M. Pucci, G. Vitale. Power Converters and AC Electrical Drives with Linear Neural Networks.CRC Press, 2012
2. Technical guide No. 1 Direct torque control - the world's most advanced AC drive technology, ABB 2011
3. T. Wildi, G. Sybille. Electrotechnique (4th edition). Les Presses de la Universita Laval, 2005.