測定による PMSM のパラメーター化
この例では、PMSM モーターのパラメーターを実験での測定から特定する方法を説明します。
モデル
パラメーターの特定には、以下に示す 3 つのモデルによって表される 3 つの異なるテストが必要です。この例では、モーター パラメーターについて既知の値を仮定し、次にシミュレーションを実行した特定テストからそれらの値を再現できることを示します。
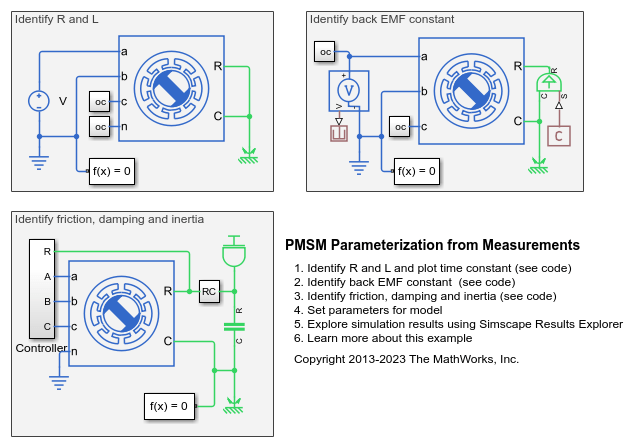
ロックされた回転子のテスト: R と L の特定
最初の手順では、回転子をロックし、固定子巻線の 1 つに電圧ステップを適用します。結果の 1 次時定数は、固定子の抵抗値とインダクタンス値によって定義され、定常状態電流は固定子の抵抗によって定義されます。

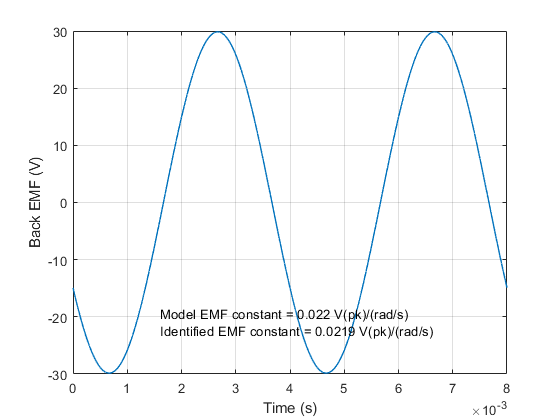
固定速度無負荷テスト: 逆起電力定数の特定
2 番目の手順では、電気負荷をかけずに動力計を接続してモーターを回転させます。これにより、逆起電力定数を推定できます。SI 単位系で表した場合、逆起電力定数はトルク定数と等しくなることに注意してください。
制御モーター テスト: 摩擦、減衰、慣性の特定
この最後の手順では、機械的負荷なしで、モーター コントローラーを使用してモーターを回します。摩擦と減衰に起因する機械的トルクは、確認済みのトルク定数を使用して固定子電流をトルクに変換することによって測定します。
以下の最初のプロットは、4 つの異なる速度で一定速度を維持するために必要な機械的トルクを示しています。低速で必要とされるトルクは主に摩擦抵抗に抗するものですが、高速では粘性減衰が支配的になります。点に合わせて直線を引くと、速度ゼロの切片によって摩擦トルクが与えられ、傾斜によって粘性減衰係数が与えられます。
2 番目のプロットは減速テストを示しています。このために、要求トルクがゼロに設定されるか、モーターの電力が切断されます。勾配によって減速が与えられ、そこに摩擦トルクと減衰トルクの値を与えるとモーターの慣性を決定できます。
