集積回路のモデル化
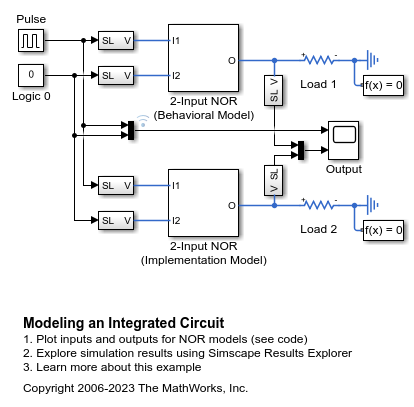
この例では、他の Simscape™ Electrical™ ブロックと併用できる集積回路のモデルを作成する 2 つの方法を示します。最初のアプローチでは、Simscape Foundation Library PS ブロック、Simulink® ブロック、またはその両方を使用して動作モデルを作成します。2 番目のアプローチでは、基本の Simscape Electrical ブロックから実装モデルを作成します。マスクの下を見て詳細を確認するには、関連するブロックを選択して Ctrl-U と入力します。
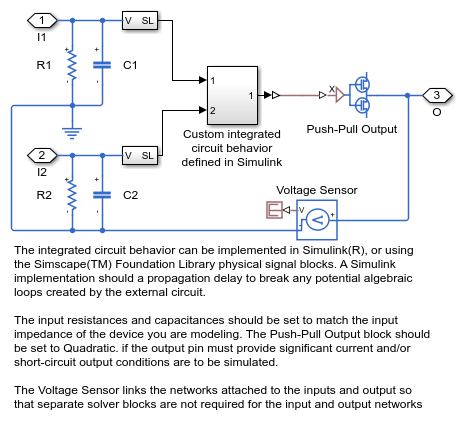
動作モデルには、よりシンプルであり、高速に実行できる可能性があるという利点があります。このアプローチは、PIC や ASIC に実装するような複雑なアルゴリズムに拡張できます。このモデルには、1 ナノ秒の伝播遅延をモデル化するための一次遅れが含まれていることに注意してください。多くの用途では、この時定数は全体的な回路のダイナミクスよりはるかに高速で、関心の対象にならないかもしれません。しかし、これを取り除くと、ゲート入力がなんらかの形でゲート出力に依存する場合に代数ループが導入されるおそれがあります。代わりの方法は、Simulink ブロックではなく PS ブロックのみを使用したアルゴリズム (この場合は NOR ゲート) を実装することです。
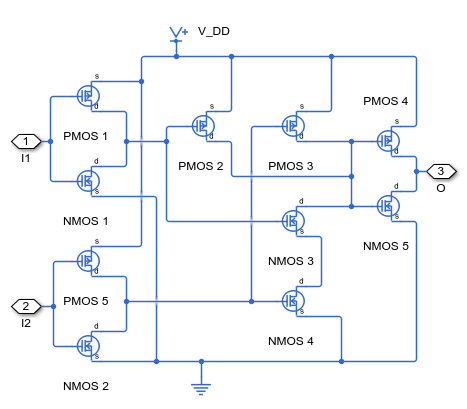
実装モデルでは、NOR 関数の実装に使用している実際の MOSFET ゲートの表現を実装します。これは実際のデバイスを表すモデルとしてはより優れていますが、それでも制限があります。特に難しいのは、データシートに基づいて MOSFET ブロックの適切なパラメーターを選択することです。ここではすべての MOSFET が同じパラメーターをもつと仮定されていますが、これは必ずしも当てはまりません。実装モデルを使用する主なデメリットは、シミュレーション速度が動作モデルに比べて大幅に遅くなる可能性が高いことです。
モデル
2-Input NOR (Behavioral Model) サブシステム
2-Input NOR (Implementation Model) サブシステム
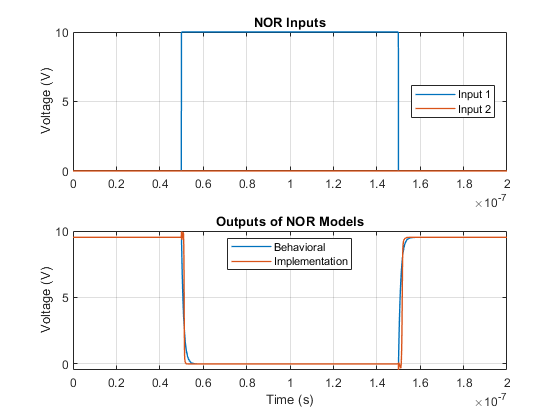
Simscape ログからのシミュレーション結果
以下のプロットは、NOR 回路の 2 つの実装の入力と出力を示しています。動作モデルと実装モデルの出力はほぼ同じです。
参考
Push-Pull Output | N-Channel MOSFET | P-Channel MOSFET