このページは前リリースの情報です。該当の英語のページはこのリリースで削除されています。
D-STATCOM
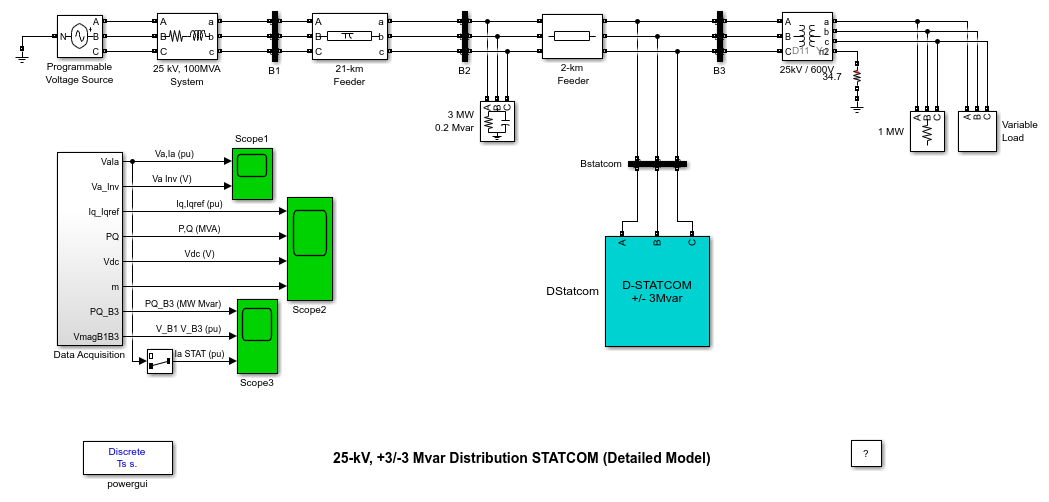
この例では、配電用 STATCOM の詳細モデルを示します。
Pierre Giroux ; Gilbert Sybille (Hydro-Quebec, IREQ)
詳細モデルと平均モデル
Specialized Power Systems で VSC ベースのエネルギー変換システムをモデル化する際は、表す周波数の範囲に応じて、詳細モデルと平均モデルの 2 種類のモデルを使用できます。
この例で示されるような詳細モデル (離散)。詳細モデルには、パワー エレクトロニクス IGBT コンバーターの詳細表現が含まれています。この例で使用している 1680 Hz のスイッチング周波数で許容範囲の精度を実現するには、比較的小さいタイム ステップ (5 μs) でモデルを離散化しなければなりません。このモデルは、比較的短期間 (一般的には数百ミリ秒~ 1 秒) の高調波および制御システムの動特性の観察に適しています。
各種の例が収録された FACTS ライブラリの power_dstatcom_avg model モデルで示されるような "平均モデル (離散)"。このタイプのモデルでは、IGBT 電圧源コンバーター (VSC) は、スイッチング周波数の 1 サイクル全体で平均した AC 電圧を生成する等価な電圧電源によって表されます。このモデルでは高調波は表現されませんが、制御システムと電力システムの相互作用から生じるダイナミクスは保持されます。このモデルでは、はるかに大きなタイム ステップを使用できるので (一般的には 50 マイクロ秒)、数秒間のシミュレーションが可能になります。
また、より長い時間枠でのシミュレーションに使用できる 3 番目のタイプのモデルとしてフェーザ モデルがあります。このタイプのモデルは D-STATCOM では使用できませんが、power_statcom.mdl モデルの類似デバイスの STATCOM では使用できます。
説明
配電用自励式無効電力補償装置 (D-STATCOM) が、25 kV の配電ネットワークでの電圧制御に使用されます。2 つのフィーダー (21 km と 2 km) により、母線 B2 および B3 に接続された負荷に電力が伝達されます。母線 B2 での力率補正には分路コンデンサが使用されます。25 kV/600 V の変圧器を経由して母線 B3 に接続されている 600 V の負荷は、アーク炉のように常に変動している電流を吸収して電圧のフリッカーを生成するプラントを表します。可変負荷電流の振幅は 5 Hz の周波数で変調されるため、皮相電力はおよそ 1 MVA ~ 5.2 MVA の範囲で変動し、遅れ力率は 0.9 で維持されます。この負荷の変動により、D-STATCOM が電圧のフリッカーを緩和する機能を観察できるようになります。
D-STATCOM は無効電力の吸収や生成により母線 B3 の電圧を制御します。この無効電力の伝達は、一次電圧 (ネットワーク側) と同相で二次電圧を生成することにより、カップリング変圧器の漏れリアクタンスを通じて行うことができます。この電圧は電圧源 PWM インバーターにより供給されます。二次電圧が母線電圧より低い場合、D-STATCOM は無効電力を吸収するインダクタンスのように機能します。二次電圧が母線電圧より高い場合、D-STATCOM は無効電力を生成するコンデンサのように機能します。
D-STATCOM は以下のコンポーネントで構成されています。
PWM インバーターとネットワークを確実に結合する "25kV/1.25kV カップリング変圧器"
2 つの IGBT ブリッジで構成される "電圧源 PWM インバーター"。この 2 重インバーター構成により、ブリッジを 1 つしか使わない場合に比べて高調波が抑えられ、その結果フィルターは小さくなり動的応答も向上します。この場合、インバーターの変調周波数は 28*60 = 1.68 kHz となるため、第 1 次高調波は約 3.36 kHz となります。
インバーター出力に接続されている "LC 減衰フィルター"。コンデンサと直列に接続されている抵抗により、クオリティ ファクターは、60 Hz で 40 となります。
インバーターの DC 電圧源として機能する "10000 マイクロファラッド (μF) のコンデンサ"
母線 B3 の電圧を制御する "電圧レギュレーター"
1.68 kHz の変調周波数を使用する "PWM パルス発生器"
電圧と電流の取得に使用する "アンチエイリアシング フィルター"
D-STATCOM コントローラーはいくつかの機能ブロックで構成されています。
"位相同期回路 (PLL)"。PLL は変圧器の一次電圧の基本波に同期します。
"2 つの測定システム"。Vmeas ブロックと Imeas ブロックは、PLL の提示する sin(wt) と cos(wt) で決定される同期指令で abc-dq 変換を実行することにより、電圧と電流の d 軸成分と q 軸成分を計算します。
"内部電流制御ループ"。このループは、d 軸と q 軸の電流を制御する 2 つの PI (比例積分) コントローラーで構成されています。コントローラーの出力は Vd 電圧と Vq 電圧で、これは PWM インバーターで生成しなければなりません。Vd 電圧と Vq 電圧は相電圧 Va、Vb、Vc に変換され、PWM 電圧の合成に使用されます。Iq 指令値は、外部電圧制御ループ (自動モードの場合) または Qref の与える指令値 (手動モードの場合) により指定されます。Id 指令値は DC リンク電圧レギュレーターにより指定されます。
"外部電圧制御ループ"。自動モード (安定化電圧) では、PI コントローラーにより、D-STATCOM コントローラーのダイアログ ボックスで定義されている参照値と同じ値に一次電圧が維持されます。
DC リンク電圧を定格値 (Vdc = 2.4 kV) に維持する "DC 電圧コントローラー"。
電気回路は Ts = 5 μs のサンプル時間を使用して離散化されます。コントローラーではこれより大きいサンプル時間 (32*Ts = 160 μs) を使用します。
シミュレーション
1. D-STATCOM の動的応答
このテストでは、可変負荷は一定に維持され、電源電圧のステップ変化に対する D-STATCOM の動的応答を観察します。可変負荷の変調が適用されないことを確認します (変調タイミング [Ton Toff]= [0.15 1]*100 > シミュレーション終了時間)。Programmable Voltage Source ブロックを使用して、25 kV 相当の内部電圧が変調されます。電圧はまず、D-STATCOM が最初に浮動状態となるように 1.077 pu にプログラムされています (B3 の電圧 = 1 pu、基準電圧 Vref = 1 pu)。0.2 秒、0.3 秒、0.4 秒で 3 つのステップがプログラムされ、電源電圧を 6% 上昇させ、6% 低下させ、さらに初期値 (1.077 pu) に戻すという処理を連続して行います。
シミュレーションを開始します。Scope1 で D-STATCOM の A 相電圧および電流の波形を、Scope2 でコントローラー信号を観察します。過渡状態が約 0.15 秒続いた後、定常状態に達します。最初に、電源電圧は D-STATCOM がアクティブにならない値をとります。ネットワークに対し無効電力の吸収も生成も行われません。t = 0.2 秒で、電源電圧は 6% 上昇します。D-STATCOM はネットワークから無効電力を吸収してこの電圧上昇を補償します (Scope2 のトレース 2 で Q=+2.7 Mvar)。t = 0.3 秒で、電源電圧は Q = 0 に相当する値から 6% 低下します。D-STATCOM は電圧を 1 pu に維持するため無効電力を生成しなければなりません (Q は +2.7 Mvar から -2.8 Mvar に変化)。D-STATCOM が誘導性から容量性の動作に切り替わると、PWM インバーターの変調指数は 0.56 から 0.9 に増加します (Scope2 のトレース 4)。これはインバーター電圧の比例上昇に対応しています。D-STATCOM 電流 (Scope1 のトレース 1 におけるマゼンタの信号) からわかるように、無効電力の反転は非常に高速で、約 1 サイクルで行われます。
2. 電圧のフリッカーの緩和
このテストでは、Programmable Voltage Source の電圧は一定に保たれます。また、Variable Load の変調を有効にし、これにより D-STATCOM が電圧のフリッカーを緩和する様子を観察できます。Programmable Voltage Source ブロックのメニューで [Time variation of] パラメーターの設定を [なし] に変更します。Variable Load ブロックのメニューで、[Modulation Timing] パラメーターを [Ton Toff]= [0.15 1] に設定します (増倍率の 100 を削除)。最後に、D-STATCOM コントローラーの [Mode of operation] パラメーターを [Q regulation] に変更し、無効電力の参照値 Qref (パラメーターの 2 行目) が 0 に設定されていることを確認します。このモードでは D-STATCOM は浮動状態になり、電圧補正は行われません。
シミュレーションを実行して、母線 B3 での P および Q の変動 (トレース 1) と、母線 B1 および B3 の電圧 (トレース 2) を Scope3 で観察します。D-STATCOM がない場合、B3 の電圧は 0.96 pu と 1.04 pu の間で変動します (+/- 4% の変動)。次に、D-STATCOM コントローラーで、[Mode of operation] パラメーターを [Voltage regulation] に戻してシミュレーションを再実行します。Scope3 で、母線 B3 における電圧の変動が +/- 0.7% に縮小されていることを確認します。D-STATCOM による電圧補正は、5 Hz で変調された無効電流 (Scope3 のトレース 3) を供給し、電圧が低い場合は 0.6 pu の容量性、電圧が高い場合は 0.6 pu の誘導性の範囲で動作を変化させることにより行います。