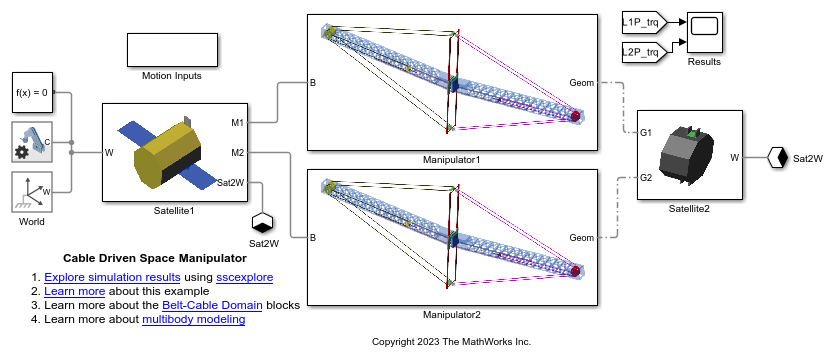
ケーブル駆動の宇宙空間マニピュレーター
この例では、ケーブル駆動の宇宙空間マニピュレーターをモデル化します。マニピュレーターは、回転ジョイントのシステム経由で接続された 2 つのリンクで構成されます。リンクはそれぞれ、マニピュレーターの動作を駆動するベルト-ケーブル回路で構成されます。また、剛性のさまざまな要件を備えるバネ-ダンパー システムも含まれます。この例で示す宇宙空間への適用では、マニピュレーターの目的は小型衛星を捕獲することです。マニピュレーターは折りたたまれた状態から始動し、伸張して目的の位置に到達するために必要な操作を実行します。プーリは運動によって作動し、必要なベルト-ケーブルの運動学的特性がそこから計算されます。
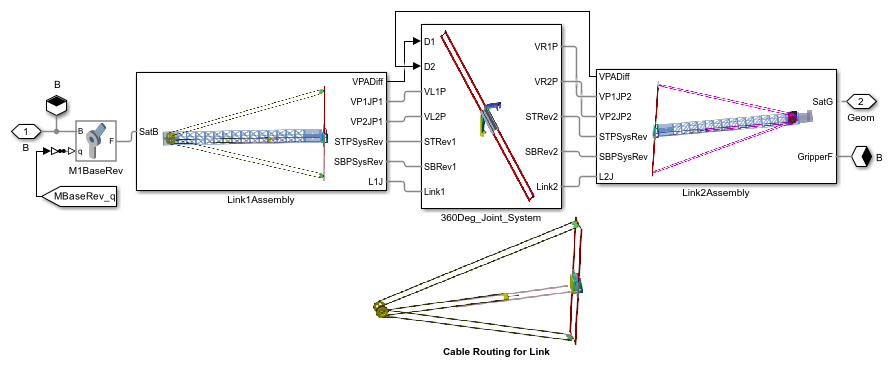
モデル
マニピュレーター サブシステム
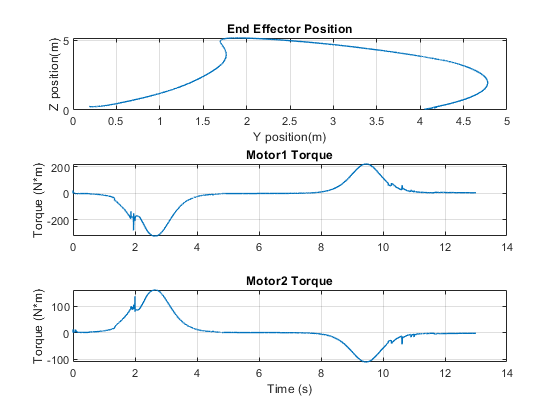
Simscape ログからのシミュレーション結果
以下のプロットは、グリッパーの位置と、モーター プーリに課せられるトルクを示しています。
参考文献: [1] W.R. Doggett, J.T. Dorsey, T.C. Jones, B. King (2014).Development of a Tendon-Actuated Lightweight In-Space MANipulator (TALISMAN)