poseGraph
説明
pGraph = poseGraph(scanMapObj)scanMapObj から姿勢グラフを作成します。この姿勢グラフを検査、可視化、および姿勢グラフの最適化に使用できます。
この関数には Navigation Toolbox™ version 2.3 以降が必要です。
姿勢グラフの出力を最適化するには、optimizePoseGraph (Navigation Toolbox) 関数を使用します。
例
2 次元 LiDAR スキャンを含む MAT ファイルをワークスペースに読み込みます。
data = load("wareHouse.mat");
scans = data.wareHouseScans;lidarscanmap オブジェクトを作成します。
scanMapObj = lidarscanmap;
addScan関数を使用して、入力データから最初の 15 スキャンを scanMapObj オブジェクトに追加します。
for currentID = 1:15 addScan(scanMapObj,scans{currentID}); end
scanMapObj から姿勢グラフを作成します。
poseGraph(scanMapObj);
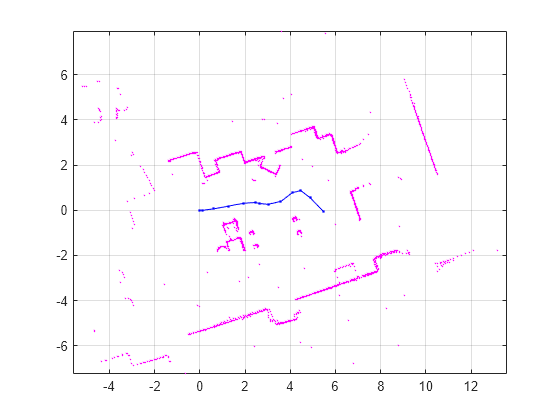
マップを可視化します。
figure show(scanMapObj);
入力引数
出力引数
バージョン履歴
R2022b で導入