このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
ドリルリーマ アクチュエータ
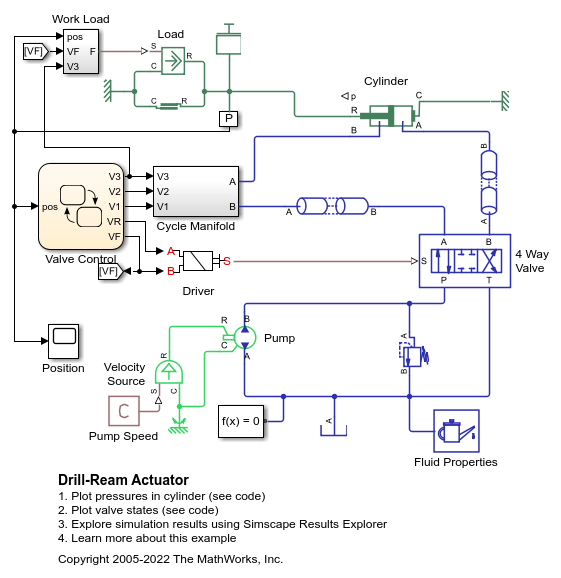
この例では、荒加工、微細穴加工、リーマ加工という 3 つの一連の技術的操作を実行する工作機械の作業ユニットを駆動するアクチュエータを示します。アクチュエータの速度は、シリンダーからの戻り流量を排出側で調整する 3 つの圧力補償流量制御バルブのいずれかで制御されます。適切な流量制御の選択は、制御ユニットで有効化される方向制御バルブによって行われます。
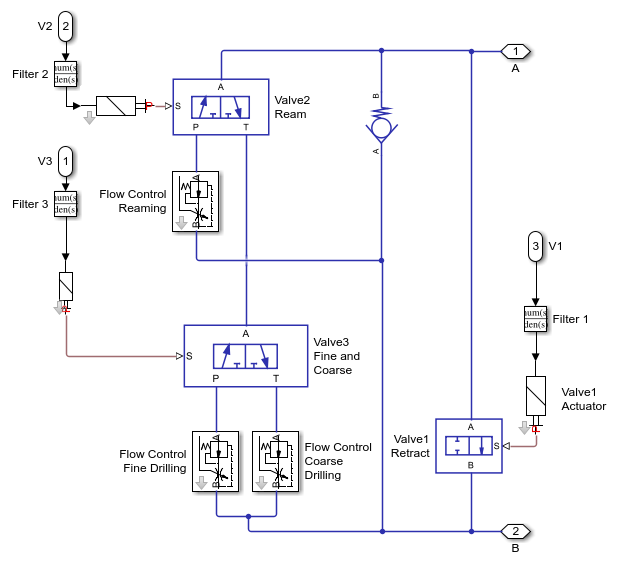
Valve Control からの信号 VF と VR は、メインの方向制御バルブをシフトすることで、それぞれ前進運動と後退運動を有効にする信号です。信号 V1 は常時閉のバルブ Valve1 Retract を有効にします。開いている場合、Valve1 Retract はすべての流量制御をバイパスし、高速な移動速度を設定します。V2 はバルブ Valve2 Ream を制御します。供給が停止すると、このバルブはリーマ加工速度に設定された Flow Control Reaming に戻りの流れを誘導します。信号 V3 は Flow Control Fine Drilling または Flow Control Coarse Drilling のいずれかに流れを誘導します。
負荷は、テーブル ルックアップ ブロックを使用して、位置に依存する力としてシミュレーションされます。
流量制御バルブは、固定オリフィスと圧力補償器で構成されるサブシステムとして配置されています。
モデル
Cycle Manifold サブシステム
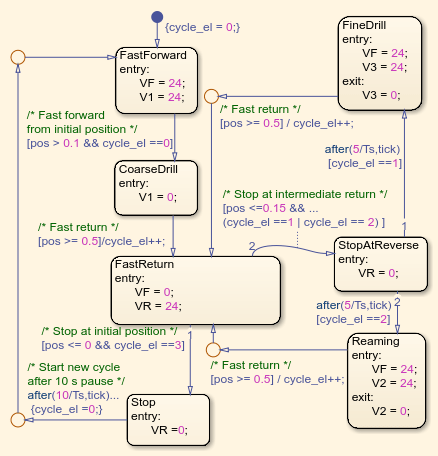
Valve Control サブシステム
Simscape ログからのシミュレーション結果
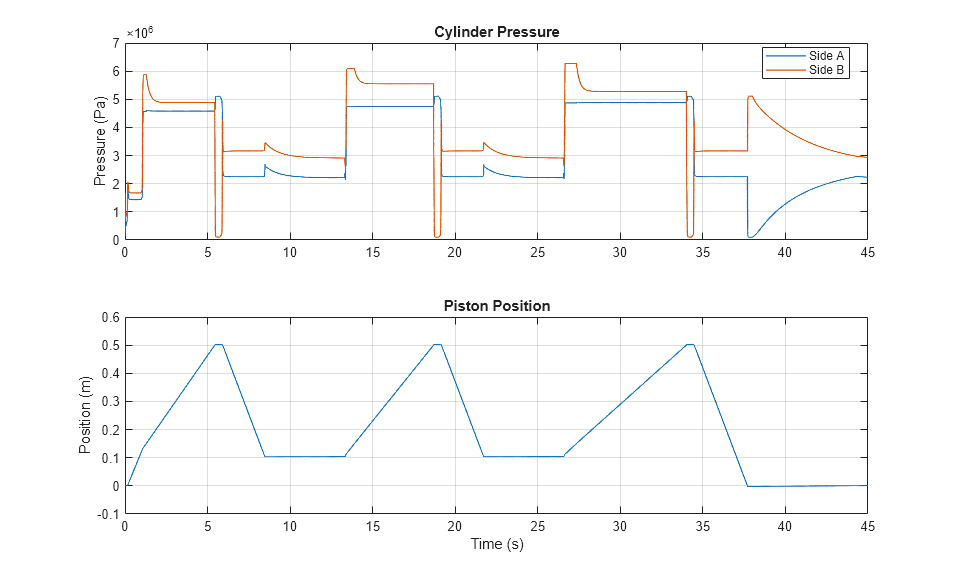
以下のプロットは、シリンダー内の圧力とピストンの位置を示しています。3 つの動作速度がプロットに示されています。
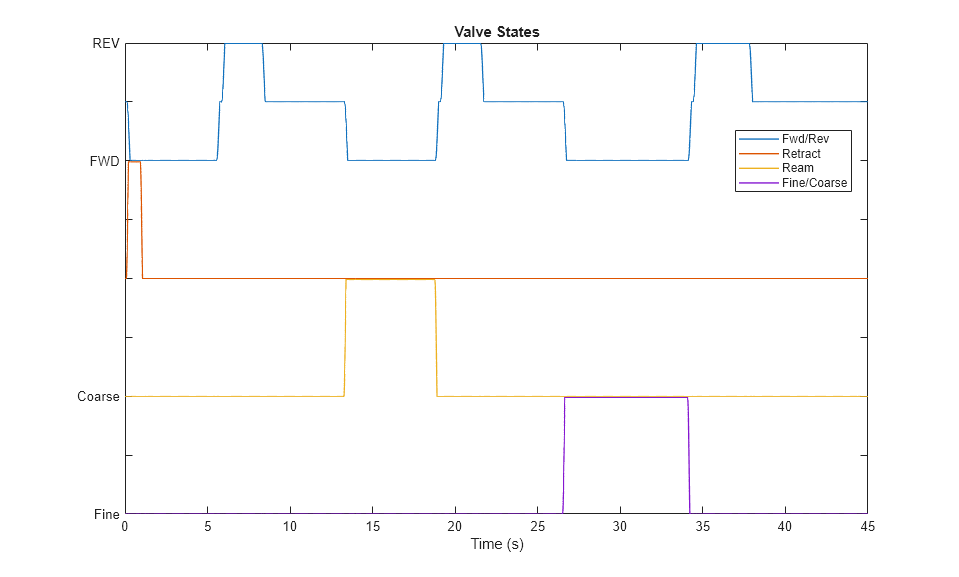
以下のプロットは、それぞれのバルブの状態を示しています。Forward/Reverse の状態は 3 つ (前進/ロック/後退) で、それ以外の状態は 2 つです。Retract と Ream の状態はオン/オフのいずれかで、Fine/Coarse バルブでは 2 つの異なる流量制限のいずれかが選択されます。