Modbus RS485 Client Read
Client device reads data from server device register(s) over RS485 network
Since R2021b
Libraries:
Embedded Coder Support Package for STMicroelectronics STM32 Processors /
STM32F746G-Discovery
Embedded Coder Support Package for STMicroelectronics STM32 Processors /
STM32F769I-Discovery
Embedded Coder Support Package for STMicroelectronics STM32 Processors /
STM32L475VG-Discovery (B-L475E-IOT01A)
Simulink Coder Support Package for STMicroelectronics Nucleo Boards /
Common
Description
In the Modbus RS485 Client Read block, the client device reads data from the register(s) of the server device.
Simulink® Coder™ Support Package for STMicroelectronics® Nucleo Boards and Embedded Coder® Support Package for STMicroelectronics Discovery Boards supports the Modbus® communication protocol over the RS485 network. The client and the server must be connected on the same RS485 network for successful Modbus communication. Each device on the RS485 network is referenced by a unique 8-bit address or identifier.
This table categories the server device registers referenced by the Modbus client device.
| Register Type | Register Size | Allowed Client Operation on Register |
|---|---|---|
| Coil | 1-bit | Read and Write |
| Discrete Input | 1-bit | Read |
| Holding Register | 16-bit | Read and Write |
| Input Register | 16-bit | Read |
The client can perform either a read or a write operation (depending on the register type) on register(s) of a server device.
Examples
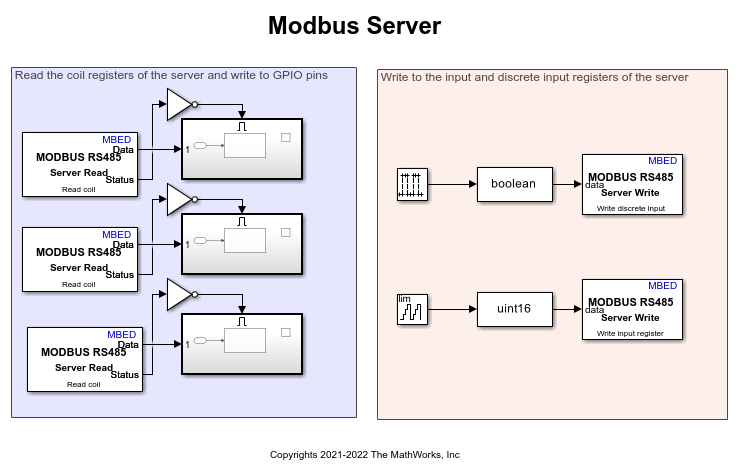
MODBUS RS485 Communication Between Client and Server Devices Using STMicroelectronics Discovery Board
Use the Embedded Coder® Support Package for STMicroelectronics® STM32 Processors to implement a MODBUS® RS485 asynchronous, serial communication between MODBUS client and server devices. The example also shows the four modes of operation: Client Read, Client Write, Server Read, and Server Write.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2021b