モデル依存関係の解析
依存関係アナライザーを使用して、モデルが直接または間接的に参照するモデル、サブシステム、およびライブラリを調査します。依存関係グラフを使用して、すべての必要なファイルおよび製品を特定します。設計をパッケージ化、共有、またはソース管理下に置くには、モデルからプロジェクトを作成します。詳細については、依存関係グラフからのプロジェクトの作成を参照してください。
依存関係グラフの表示と探索
1. ModelReferenceHierarchy プロジェクトおよび sldemo_mdlref_depgraph モデルを開きます。
2. モデル依存関係グラフを開くには、[モデル化] タブで下矢印をクリックして [設計] セクションを展開します。[依存関係] で、[依存関係アナライザー] をクリックします。
依存関係アナライザーは、既定では [モデルの階層構造] ビューを使用して依存関係グラフを開きます。モデル インスタンス ビューに切り替えるには、[ビュー] セクションで [モデル インスタンス] をクリックします。詳細については、モデルの依存関係ビューを参照してください。
最初の依存関係の分析を実行した後、後続の分析では結果が増分更新されます。依存関係アナライザーは、前回の解析以降に変更があったファイルを特定し、それらのファイルの依存関係データを更新します。完全な解析を実行するには、依存関係アナライザーで、[解析]、[すべて再解析] を選択します。
アドオン内での依存関係を解析するには、[解析]、[アドオン] を選択します。使用可能なオプションの詳細については、解析範囲を参照してください。
3. 依存関係を水平方向のレイアウトで表示するには、[レイアウト] セクションで [水平方向] をクリックします。
4. 依存関係グラフでボックスをダブルクリックすると、対応するモデルが Simulink® エディターで開きます。
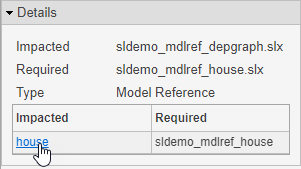
5. 2 つのファイルの関係について詳細情報を確認するには、依存関係矢印を選択します。[プロパティ] ペインの [詳細] セクションで、調査対象のファイルの絶対パス、依存関係のタイプ、および依存関係が生じる場所を確認できます。
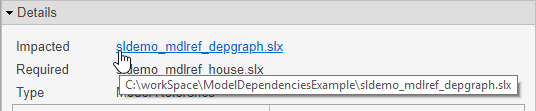
6. ファイルを開いて依存関係の発生場所を強調表示するには、[詳細] セクションで、[影響あり] の下のリンクをクリックします。
たとえば、sldemo_mdlref_depgraph モデルを開いて sldemo_mdlref_house への依存性が生じる場所を強調表示するには、sldemo_mdlref_depgraph と sldemo_mdlref_house の間の依存関係の矢印を選択します。右側の [プロパティ] ペインの [影響あり] の下で、house をクリックします。
モデルの依存関係ビュー
モデルの依存関係は、[モデルの階層構造] ビューまたは [モデル インスタンス] ビューを使用して調査できます。
モデルの階層構造ビュー
[モデルの階層構造] ビューは、最上位モデルが参照するモデル、サブシステム、ライブラリ、データ ディクショナリ ファイルを表示します。
モデルで 2 回以上ファイルが参照される場合でも、参照されたファイルがビューに表示されるのは 1 回のみです。
次の図では、青のボックスはモデル ファイル、赤のボックスはライブラリ、黄のボックスはサブシステム参照を表します。矢印は依存関係を表します。たとえば、この例の矢印は、
aero_guidanceモデルが 2 つのライブラリaerospaceとsimulink_need_slupdateを参照していることを示します。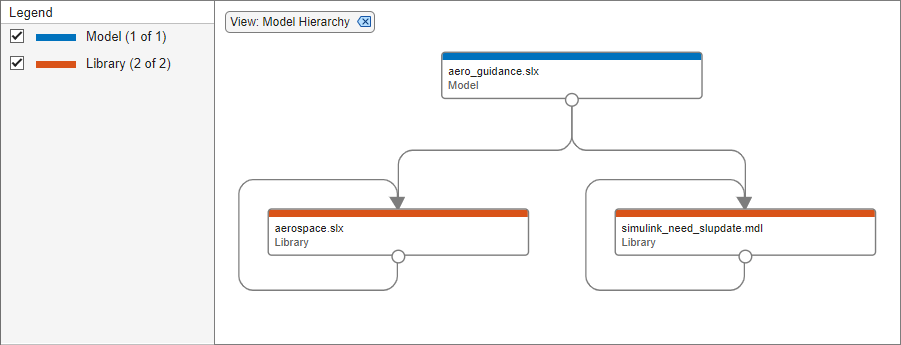
ライブラリからそれ自体を指す矢印は、ライブラリそのものを参照することを示します。そのライブラリ内のブロックは同じライブラリ内の他のブロックを参照します。この例のビューでは、ライブラリ
aerospaceおよびsimulink_need_slupdateがそれ自体を参照しています。濃い赤のボックスは保護モデル (
.slxpファイル) を表します。保護された参照モデルは、開いたり、編集したりすることはできません。サードパーティからの保護モデルの参照を参照してください。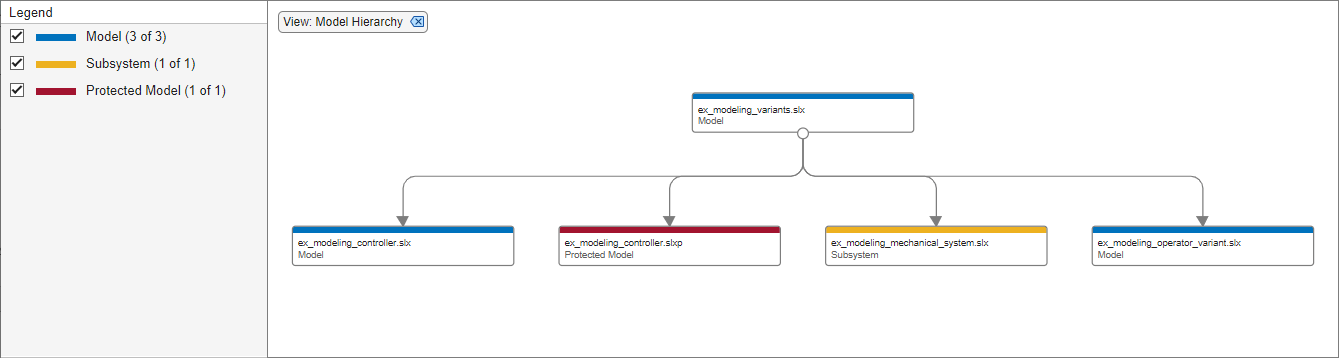
モデル インスタンス ビュー
[モデル インスタンス] ビューは、モデルに対するすべての参照を、最上位モデルをルートとするモデル参照の階層に表示します。各ボックスは最上位モデルとその参照を表します。モデル参照を参照してください。
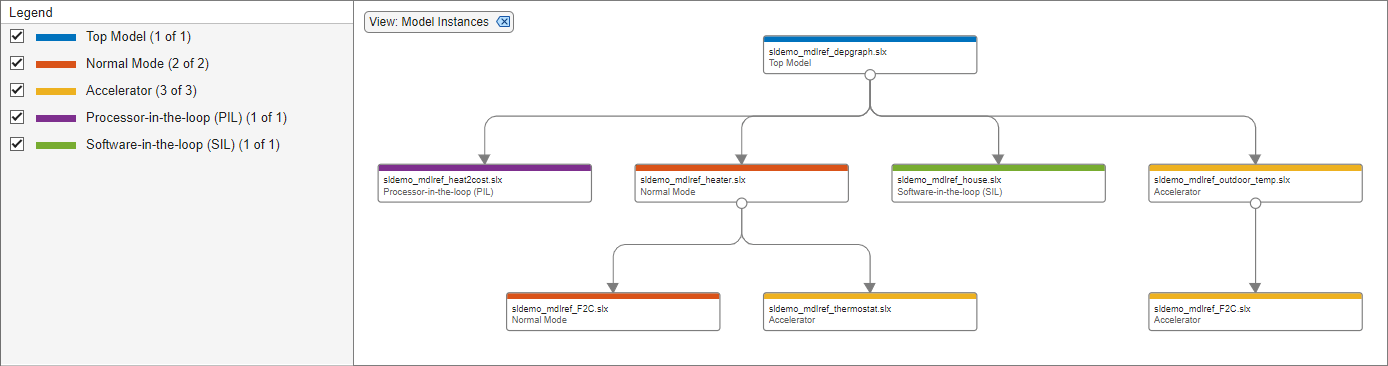
モデルの階層構造が同じモデルを 2 回以上参照する場合、参照されるモデルはインスタンス ビューに、参照されるたびに 1 回、複数回表示されます。このグラフ例では、
sldemo_mdlref_depgraphのモデル参照階層にモデルsldemo_mdlref_F2Cに対する参照が 2 つ含まれています。黄のボックスはアクセラレータ モードのインスタンス、赤のボックスはノーマル モードのインスタンス、紫のボックスはプロセッサインザループ モードのインスタンス、緑のボックスはソフトウェアインザループ モードのインスタンスを表します。モデルの階層構造内のシミュレーション モードの選択を参照してください。
前のグラフ例の
sldemo_mdlref_F2Cに対する参照は、一方がノーマル モードでもう一方がアクセラレータ モードになっています。依存関係アナライザーは、シミュレーション モードのオーバーライドを検出し、シミュレーション モードに
(Overridden)を付加します。ノーマル モードで実行するように設定された参照モデルがアクセラレータ モードで実行される場合、シミュレーション モードがオーバーライドされます。これは、アクセラレータ モードで実行される別のモデルによって直接または間接的に参照されたときに発生します。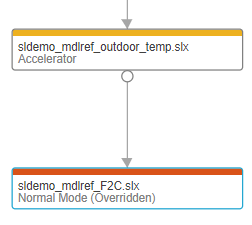
必要な製品の検索
設計内のファイルに必要な製品およびアドオンを検索するには、依存関係グラフ内のボックスを選択します。依存関係アナライザーには、[プロパティ] ペインの [製品] セクションの選択によって、必要な製品のリストが表示されます。
設計全体に必要なアドオンを検索するには、グラフの背景をクリックしてすべての選択を解除します。[プロパティ] ペインの [製品] セクションの製品のリストを調査します。
特定の製品 (たとえば Simulink®) を使用するファイルをグラフで強調表示するには、[プロパティ] ペインの [製品] セクションで製品にカーソルを合わせ、拡大鏡アイコン  をクリックします。
をクリックします。
これらのファイルを調べるには、検索ボックス ([productName を使用するファイル] など) の矢印を使用します。
強調表示を元に戻すには、検索ボックスを閉じます。
さらに調査するために、製品を使用するファイルをリストして、これらのファイルのどこで依存関係が発生しているかを調べることができます。[製品] セクションの [プロパティ] ペインで、製品をポイントして検索フォルダー アイコン  をクリックします。
をクリックします。
依存関係の分析結果のエクスポート
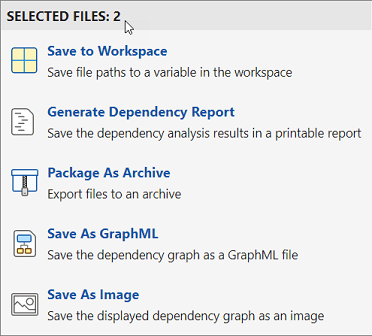
依存関係グラフに表示されているすべてのファイルをエクスポートするには、グラフの背景をクリックしてすべてのファイルの選択を解除します。依存関係アナライザー ツールストリップの [エクスポート] セクションで [エクスポート] をクリックします。利用可能なオプションから選択します。
ワークスペースにエクスポート — ファイル パスをワークスペースの変数に保存します。
依存関係レポートの生成 — 依存関係の分析結果を印刷可能なレポート (HTML、Word または PDF) に保存します。
アーカイブとしてパッケージ化 — グラフ内のファイルをアーカイブとしてエクスポートします。
GraphML として保存 — 依存関係の分析結果を GraphML ファイルとして保存します。
イメージとして保存 — 表示された依存関係グラフをイメージとして保存します。
グラフ内のファイルのサブセットをエクスポートすることもできます。ファイルを選択し、[エクスポート] をクリックします。選択されたファイル数がメニューに表示されます。依存関係アナライザーは、選択されたファイルのみをエクスポートします。
メモ
[アーカイブとしてパッケージ化] を使用した場合、依存関係アナライザーは、選択されたファイルおよびそれらすべての依存関係をアーカイブに含めます。
依存関係グラフからのプロジェクトの作成
設計をパッケージ化、共有、またはソース管理下に置くには、モデルからプロジェクトを作成します。モデル依存関係グラフからプロジェクトを作成できます。
依存関係グラフに表示されているすべてのファイルからプロジェクトを作成するには、グラフの背景をクリックします。このアクションによって選択されたすべてのファイルがクリアされます。
依存関係アナライザー ツールストリップの [エクスポート] セクションで [プロジェクトを作成] をクリックします。
[プロジェクトを作成] ウィンドウで [OK] をクリックします。
依存関係アナライザーによってプロジェクトが作成され、グラフが再度読み込まれます。
グラフ内のファイルのサブセットからプロジェクトを作成することもできます。ファイルを選択し、[プロジェクトを作成] をクリックします。依存関係アナライザーには、選択されたファイルと、プロジェクト内のそれらすべての依存関係が含まれます。
関連する例
- Perform Block-Level Impact Analysis Using Dependency Analyzer
- モデル参照階層の可視化
- MATLAB と Simulink での誘導システムの設計
詳細
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)