MATLAB、Simulink、および RoadRunner は、エンジニアが実際の動作を解析し、車両テストを削減して、組み込みソフトウェアの機能を検証できるようにすることで、自動運転の知覚、計画、および制御システムの設計を推進します。MATLAB、Simulink、RoadRunner を使用すると、以下を行うことができます。
- データへのアクセス、可視化、ラベル付け
- 運転シナリオのシミュレーション
- 計画および制御アルゴリズムの設計
- 知覚アルゴリズムの設計
- コード生成を使用したアルゴリズムの展開
- 統合およびテスト

MATLAB、Simulink、RoadRunner による自動運転の導入事例






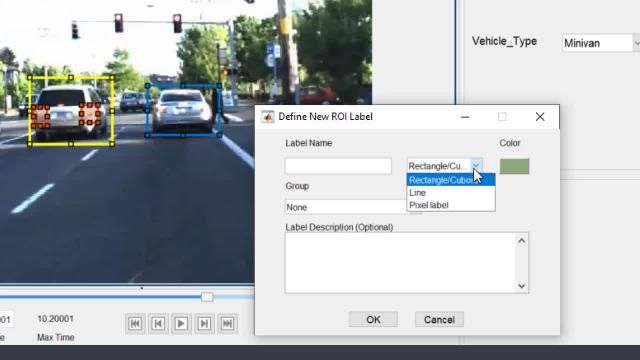
データへのアクセス、可視化、ラベル付け
CAN や ROS 用の MATLAB インターフェイスを使用して、ライブおよび記録されたドライビングデータにアクセスすることができます。また、組み込みのツールを使用して、インポートされたデータを可視化したり、ラベルを付けたりすることもできます。たとえば、グラウンド トゥルース ラベラー アプリでは、複数の信号を対話的に可視化してラベル付けするためのインターフェイスが用意されています。また、これらの信号を自動的にラベル付けし、ラベル付けされたデータをワークスペースにエクスポートすることもできます。
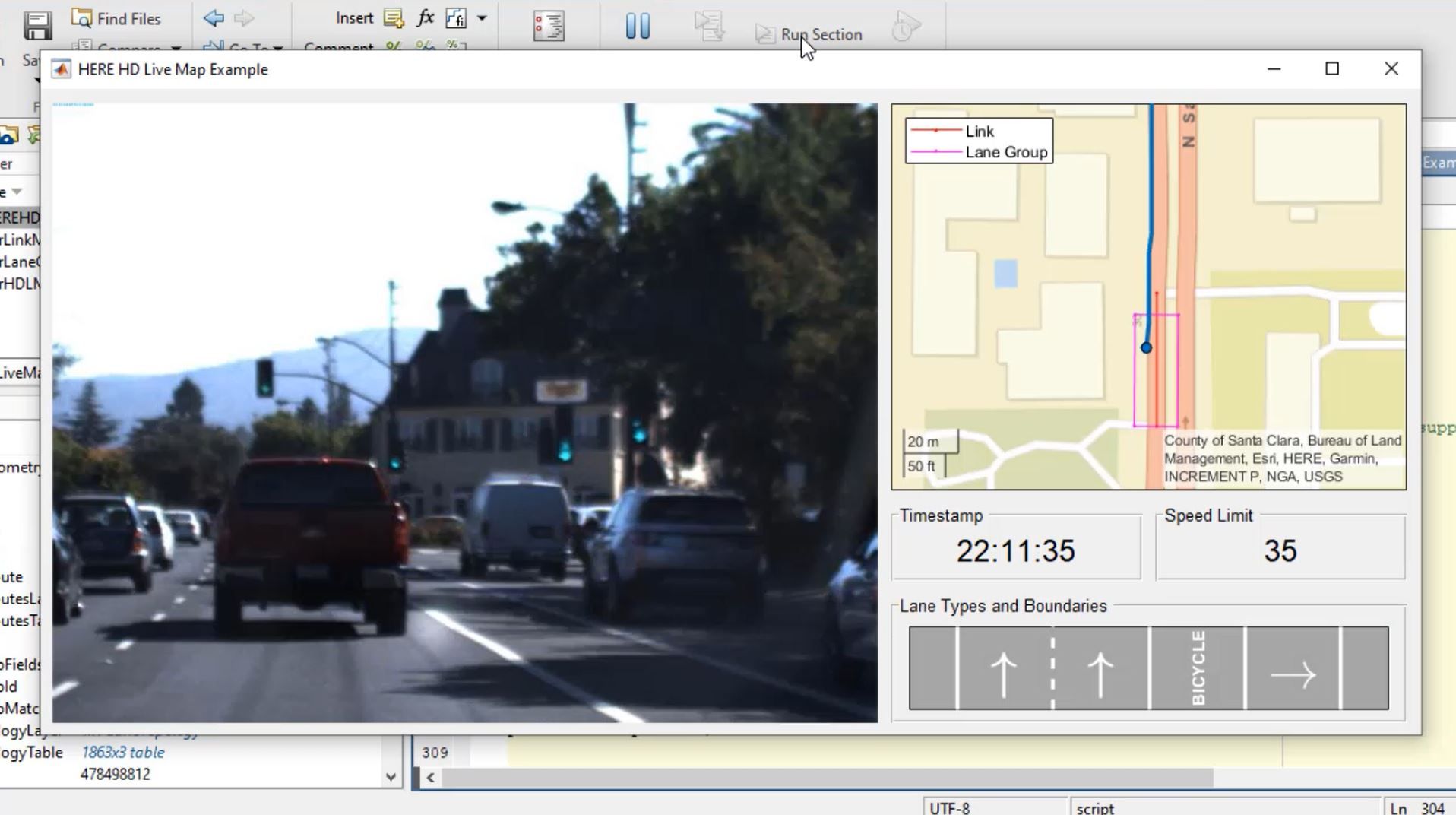
地図データにアクセスして可視化するには、HERE HD Live Map や OpenStreetMap が便利です。
ビデオ チュートリアル:
運転シナリオのシミュレーション
直方体および Unreal Engine シミュレーション環境を MATLAB と併用し、仮想シナリオでのアルゴリズムの開発やテストを行うことができます。
直方体ベースの環境では、動作主体を単純なグラフで表現し、確率的なセンサーモデルを使用します。制御、センサーフュージョン、モーション プランニングのためにこの環境を利用することができます。
Unreal Engine 環境を利用して、知覚と直方体ベースの環境の使用事例のためのアルゴリズムを開発することができます。RoadRunner では、MATLAB や Simulink のほか、CARLA、Vires VTD、NVIDIA Drive Sim などのシミュレーターで使用するシーンを設計することができます。また、RoadRunner は FBX や OpenDRIVE などの業界標準のファイル形式へのエクスポートもサポートしています。
ビデオ チュートリアル:



プランニングと制御アルゴリズムの設計
MATLAB と Simulink を使用して、パスプランニングと制御アルゴリズムを開発することができます。自律型車両が計画された軌跡を走行することができるように、横方向および縦方向のコントローラーを使用した車両制御システムを設計することができます。
また、2D および 3D シミュレーション環境とともに、センサーモデルや車両運動モデルを使用して、アルゴリズムを合成的にテストすることもできます。

ビデオ チュートリアル:

知覚アルゴリズムの設計
カメラ、Lidar、レーダーからのデータを使用して、知覚アルゴリズムを開発することができます。知覚アルゴリズムには、検出、追跡、位置推定などがあり、自動ブレーキ、ステアリング、マップ作成、オドメトリなどのアプリケーションに使用することができます。
これらのアルゴリズムは、緊急ブレーキやステアリングなどの ADAS アプリケーションの一部として実装することができます。
MATLAB を使用して、センサーフュージョン、SLAM (自己位置推定と環境地図作成)、マップ作成、およびオドメトリ向けのアルゴリズムを開発することができます。

ビデオ チュートリアル:

アルゴリズムの展開
コード生成ワークフローを使用して、知覚、計画、および制御アルゴリズムをハードウェアに展開することができます。サポートしているコード生成言語は、C、C++、CUDA、Verilog、VHDL® です。
また、ROS や AUTOSAR などのサービス指向アーキテクチャにアルゴリズムを展開することもできます。
自動生成されたコードを使用して、センサーと他の ECU コンポーネントを接続することができます。NVIDIA、Intel、ARM などのハードウェアを含む、複数の配布ターゲットがサポートされています。

統合およびテスト
知覚、計画、制御システムを統合してテストすることができます。Requirements Toolbox を使用すると、要件を取得して管理することができます。また、Simulink Test を使用して、テストケースの実行と自動化を並列化することができます。
ドキュメンテーション

リファレンス アプリケーション
以下の例を ADAS および自動運転アプリケーションの設計とテストの基礎として使用できます。
お探しのものが見つかりませんか? Automated Driving Toolbox のドキュメンテーション ページにアクセスすると、すべての例をご覧いただけます。

営業へのお問い合わせ
今すぐ始める
Building Key Competencies for Autonomous Vehicle Development
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)