Simscape Driveline (旧 SimDriveline) には、回転機械と並進機械システムをモデル化してシミュレーションするためのコンポーネント ライブラリが用意されています。これには、ウォームギアや親ねじなどに加え、エンジン、タイヤ、トルクコンバーターなどの車両コンポーネントのモデルが含まれています。これらのコンポーネントを使用して、ヘリコプターのドライブトレイン、産業機械、車両のパワートレイン、その他のアプリケーションにおける機械動力のトランスミッションをモデル化することができます。Simscape 製品ファミリのコンポーネントを使用して、電気、油圧、空気圧、およびその他の物理システムをモデルに統合できます。
Simscape Driveline は、制御システムを開発し、システムレベルでのパフォーマンスをテストする作業を支援します。MATLAB ベースの Simscape 言語を使用してカスタム コンポーネント モデルを作成できます。これにより物理モデリング コンポーネント、ドメイン、およびライブラリのテキストによる構築が可能です。MATLAB 変数および式を使用してモデルをパラメーター化し、Simulink で物理システムの制御システムを設計できます。ハードウェアインザループ (HIL) システムを含むその他のシミュレーション環境へモデルを展開するため、Simscape Driveline では C コード生成をサポートしています。
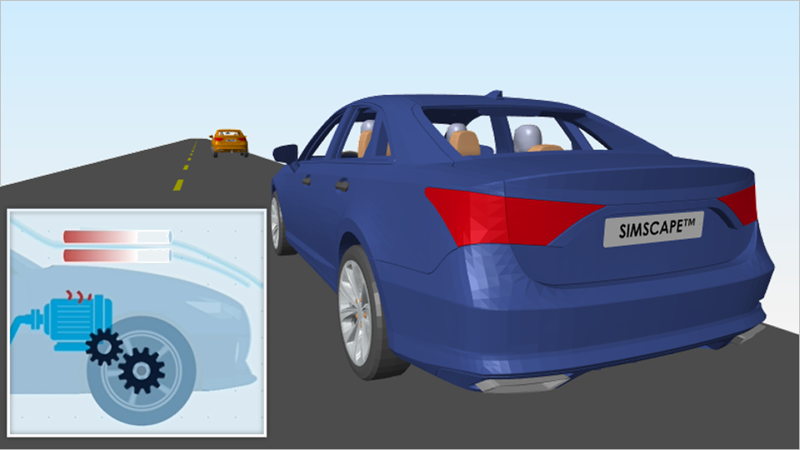
車両パワートレイン
ハイブリッド、ピュア EV、および従来型のパワートレインを、乗用車、オフロード、およびカスタム車両向けにモデル化します。損失や熱の影響を考慮した車両レベルの性能を評価します。

車両のトランスミッション
テンプレートを使用するか、カスタム設計を組み立てて、システム性能を評価し、制御システムを開発します。詳細バリアントと抽象バリアントを切り替えて、テストを高速化します。

産業機械
設計に合わせてカスタマイズされたモデルを作成して、負荷を決定し、制御システムを設計します。動的テストおよび静的テストを実施して、システムレベルの要件をコンポーネントにマッピングします。

フォールトトレランス
ギアの歯の摩耗や摩擦の増加など、劣化した部品の動作を使用して設計をテストすることで、損失、機器のダウンタイム、コストを最小限に抑えることができます。

仮想テスト
ハードウェアのプロトタイプでは簡単にテストできない条件でのシステムの挙動を検証します。一連のテストをマルチコアのワークステーションまたはクラスターで並列実行します。

モデルの展開
Simscape モデルを C コードに変換し、dSPACE®、Speedgoat、OPAL-RT、その他のリアルタイムシステムで、HIL テストを使用して制御アルゴリズムをテストします。

Simscape プラットフォーム
電気、熱、機械、油圧、空気圧のシステムを単一環境に統合してテストします。統合の問題を特定して、システムレベルでのパフォーマンスを最適化します。

MATLAB および Simulink
MATLAB を使用して、モデルアセンブリ、テスト、後処理などのタスクを自動化します。Simulink を使用して、制御アルゴリズムとハードウェア設計を単一環境に統合します。

調査から運用まで
Simscape のモデルを使用して、要件の調整、制御システムの設計、組み込みコントローラーのテスト、デジタルツインとして稼働中の設備をサポートします。
製品リソース:
Simscape 製品ファミリ
Simscape 製品ファミリには、物理システムをシミュレーションするためのモデルとソルバー技術が用意されています。コンポーネントを回路図に組み込むことで、電気、機械、流体、その他の物理システムをモデル化します。
Simscape
マルチドメイン物理システムのモデル化およびシミュレーション
Simscape Electrical
電子、メカトロニクス、および電力システムのモデル化とシミュレーション
Simscape Battery
バッテリーおよびエネルギー貯蔵システムの設計とシミュレーション
Simscape Fluids
流体システムのモデル化とシミュレーション
Simscape Driveline
回転機械システムと並進機械システムのモデル化およびシミュレーション
Simscape Multibody
マルチボディ機械システムのモデル化およびシミュレーション
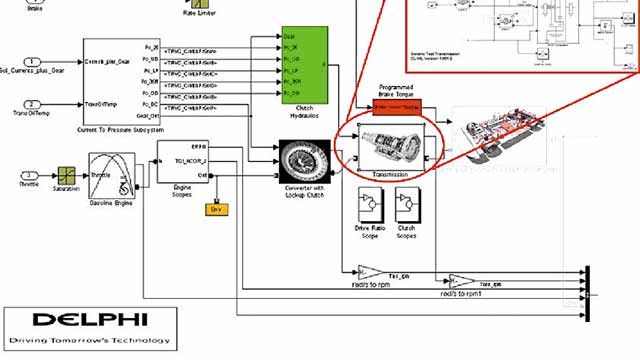
「Simulink と Simscape Driveline を導入したことで、トランスミッションの機械モデルの構築にかかる時間を 6 週間短縮でき、次のモデルはさらに短期間で構築できるようになりました。その結果、顧客の環境に早期に実装できるようになり、複数の顧客をサポートできるようになりました。」
Andrew Herman, Delphi Powertrain Systems
あなたは学生ですか?
ご所属の学校にはすでに Campus-Wide License が導入されていて、MATLAB、Simulink、その他のアドオン製品を利用できる可能性があります。
次のトピック



また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)