このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
opticalFlowFarneback
Farneback 法を使用してオプティカル フローを推定するオブジェクト
説明
Farneback 法を使用して移動するオブジェクトの方向と速度を推定するオプティカル フロー オブジェクトを作成します。オブジェクト関数 estimateFlow を使用して、オプティカル フロー ベクトルを推定します。オブジェクト関数 reset を使用すると、オプティカル フロー オブジェクトの内部状態をリセットできます。
作成
説明
opticFlow = opticalFlowFarneback
opticFlow = opticalFlowFarneback(Name,Value)Name,Value ペアの引数を 1 つ以上指定したプロパティを使用してオプティカル フロー オブジェクトを返します。指定していないプロパティはすべて既定値になります。各プロパティ名を引用符で囲みます。
たとえば、opticalFlowFarneback('NumPyramidLevels',3) です。
プロパティ
オブジェクト関数
estimateFlow | オプティカル フローの推定 |
reset | Reset the internal state of the optical flow estimation object |
例
Farneback 法を使用したオプティカル フローの推定
ビデオ ファイルを読み取ります。読み取るフレームのタイムスタンプを指定します。
vidReader = VideoReader('visiontraffic.avi','CurrentTime',11);
Farneback 法を使用してオプティカル フローを推定するオプティカル フロー オブジェクトを作成します。出力はオブジェクトで、オプティカル フロー推定法とそのプロパティを指定します。
opticFlow = opticalFlowFarneback
opticFlow =
opticalFlowFarneback with properties:
NumPyramidLevels: 3
PyramidScale: 0.5000
NumIterations: 3
NeighborhoodSize: 5
FilterSize: 15
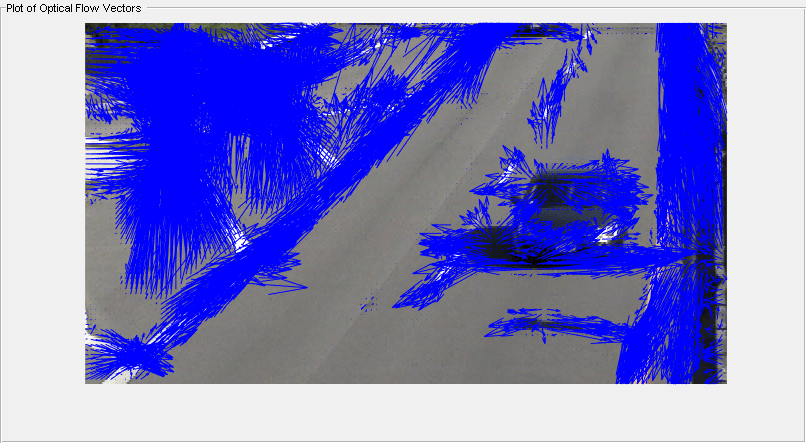
カスタム Figure ウィンドウを作成して、オプティカル フロー ベクトルを可視化します。
h = figure; movegui(h); hViewPanel = uipanel(h,'Position',[0 0 1 1],'Title','Plot of Optical Flow Vectors'); hPlot = axes(hViewPanel);
イメージ フレームを読み取って、グレースケール イメージに変換します。連続するイメージ フレームからオプティカル フローを推定します。現在のイメージ フレームを表示して、オプティカル フロー ベクトルを Quiver プロットとしてプロットします。
while hasFrame(vidReader) frameRGB = readFrame(vidReader); frameGray = im2gray(frameRGB); flow = estimateFlow(opticFlow,frameGray); imshow(frameRGB) hold on plot(flow,'DecimationFactor',[5 5],'ScaleFactor',2,'Parent',hPlot); hold off pause(10^-3) end

アルゴリズム
Farneback アルゴリズムは、各レベルが前のレベルと比較して低い解像度をもつイメージ ピラミッドを生成します。1 より大きいピラミッド レベルを選択すると、アルゴリズムによって、最も低いレベルから始めて複数レベルの解像度で点を追跡できます。ピラミッド レベルの数を増やすと、アルゴリズムによってフレーム間でのより大きい点の変位に対処できます。ただし、計算数も増加します。次の図は、3 つのレベルをもつイメージのピラミッドを示しています。

追跡は最も低い解像度レベルから開始され、収束するまで継続します。あるレベルで検出された点の位置が、後続のレベルのキーポイントとして伝播されます。このようにして、アルゴリズムによって各レベルで追跡が調整されます。ピラミッド分解を使用すると、アルゴリズムによって、近傍のサイズより大きい距離になる可能性のあるピクセルの大きな動きに対処できます。
参照
[1] Farneback, G. “Two-Frame Motion Estimation Based on Polynomial Expansion.” In Proceedings of the 13th Scandinavian Conference on Image Analysis, 363 - 370. Halmstad, Sweden: SCIA, 2003.
拡張機能
バージョン履歴
R2015b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)