このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
evaluateDetectionPrecision
(削除予定) オブジェクト検出の適合率メトリクスの評価
evaluateDetectionPrecision は将来のリリースで削除される予定です。代わりに evaluateObjectDetection を使用してください。
構文
説明
averagePrecision = evaluateDetectionPrecision(detectionResults,groundTruthData)groundTruthData と比較した detectionResults の平均適合率を返します。平均適合率を使用して、オブジェクト検出器のパフォーマンスを測定できます。マルチクラス検出器の場合、関数は averagePrecision を groundTruthData で指定された順序で各オブジェクト クラスのスコアのベクトルとして返します。
[ は、前の構文の入力引数を使用して、適合率/再現率曲線をプロットするデータ点を返します。averagePrecision,recall,precision] = evaluateDetectionPrecision(___)
[___] = evaluateDetectionPrecision(___, は、検出をグラウンド トゥルース ボックスに割り当てるためのオーバーラップしきい値を指定します。threshold)
例
YOLO v2 オブジェクト検出器の適合率の評価
この例では、事前学習済みの YOLO v2 オブジェクト検出器を評価する方法を説明します。
車両のグラウンド トゥルース データの読み込み
車両の学習データを含む table を読み込みます。1 列目には学習イメージが含まれ、残りの列にはラベル付き境界ボックスが含まれています。
data = load('vehicleTrainingData.mat');
trainingData = data.vehicleTrainingData;ローカルの車両データ フォルダーへの絶対パスを追加します。
dataDir = fullfile(toolboxdir('vision'), 'visiondata'); trainingData.imageFilename = fullfile(dataDir, trainingData.imageFilename);
table のファイルを使用して imageDatastore を作成します。
imds = imageDatastore(trainingData.imageFilename);
table のラベル列を使用して boxLabelDatastore を作成します。
blds = boxLabelDatastore(trainingData(:,2:end));
検出用の YOLOv2 検出器の読み込み
学習用の layerGraph を含む検出器を読み込みます。
vehicleDetector = load('yolov2VehicleDetector.mat');
detector = vehicleDetector.detector;結果の評価およびプロット
imageDatastore を指定して検出器を実行します。
results = detect(detector, imds);
グラウンド トゥルース データに対して結果を評価します。
[ap, recall, precision] = evaluateDetectionPrecision(results, blds);
適合率/再現率曲線をプロットします。
figure; plot(recall, precision); grid on title(sprintf('Average precision = %.1f', ap))

一時停止標識検出器の適合率の評価
プリロードされたグラウンド トゥルース情報を使用して ACF ベースの検出器に学習させます。学習イメージで検出器を実行します。検出器を評価し、適合率/再現率曲線を表示します。
グラウンド トゥルースの table を読み込みます。
load('stopSignsAndCars.mat') stopSigns = stopSignsAndCars(:,1:2); stopSigns.imageFilename = fullfile(toolboxdir('vision'),'visiondata', ... stopSigns.imageFilename);
ACF ベースの検出器に学習させます。
detector = trainACFObjectDetector(stopSigns,'NegativeSamplesFactor',2);ACF Object Detector Training The training will take 4 stages. The model size is 34x31. Sample positive examples(~100% Completed) Compute approximation coefficients...Completed. Compute aggregated channel features...Completed. -------------------------------------------- Stage 1: Sample negative examples(~100% Completed) Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 19 weak learners. -------------------------------------------- Stage 2: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 20 weak learners. -------------------------------------------- Stage 3: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 54 weak learners. -------------------------------------------- Stage 4: Sample negative examples(~100% Completed) Found 84 new negative examples for training. Compute aggregated channel features...Completed. Train classifier with 42 positive examples and 84 negative examples...Completed. The trained classifier has 61 weak learners. -------------------------------------------- ACF object detector training is completed. Elapsed time is 14.6892 seconds.
結果を保存する table を作成します。
numImages = height(stopSigns); results = table('Size',[numImages 2],... 'VariableTypes',{'cell','cell'},... 'VariableNames',{'Boxes','Scores'});
学習イメージで検出器を実行します。結果を table として保存します。
for i = 1 : numImages I = imread(stopSigns.imageFilename{i}); [bboxes, scores] = detect(detector,I); results.Boxes{i} = bboxes; results.Scores{i} = scores; end
グラウンド トゥルース データに対して結果を評価します。適合率の統計を取得します。
[ap,recall,precision] = evaluateDetectionPrecision(results,stopSigns(:,2));
適合率/再現率曲線をプロットします。
figure plot(recall,precision) grid on title(sprintf('Average Precision = %.1f',ap))

入力引数
detectionResults — オブジェクトの位置とスコア
table
オブジェクトの位置とスコア。検出された各オブジェクトの境界ボックスとスコアを含む 2 列の table として指定します。マルチクラス検出の場合、3 番目の列には各検出の予測ラベルが含まれます。境界ボックスは M 行 4 列の cell 配列に保存しなければなりません。スコアは M 行 1 列の cell 配列に保存し、ラベルは categorical ベクトルとして保存しなければなりません。
オブジェクトを検出するときに、imageDatastore を使用して検出結果の table を作成できます。
ds = imageDatastore(stopSigns.imageFilename);
detectionResults = detect(detector,ds);データ型: table
groundTruthData — ラベル付きのグラウンド トゥルース
データストア | table
ラベル付きのグラウンド トゥルース。データストアまたは table として指定します。
各境界ボックスは [x,y,width,height] の形式でなければなりません。
データストア — 関数
readおよび関数readallが、境界ボックスとラベルの cell ベクトルの列を 2 つ以上もつ cell 配列または table を返すデータストア。境界ボックスは、[x,y,width,height] 形式の M 行 4 列の行列の cell 配列内になければなりません。データストアの関数readおよび関数readallは、次のいずれかの形式を返さなければなりません。{boxes,labels} —
boxLabelDatastoreはこのタイプのデータストアを作成します。{images,boxes,labels} — 統合されたデータストア。たとえば、
combine(imds,blds) を使用しています。
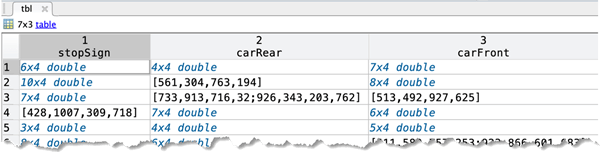
boxLabelDatastoreを参照してください。table — 1 つ以上の列。すべての列に境界ボックスが含まれています。各列は、stopSign、carRear、carFront などの単一のオブジェクト クラスを表す M 行 4 列の行列を含む cell ベクトルでなければなりません。これらの列には、[x,y,width,height] 形式の、M 個の境界ボックスの 4 要素 double 配列が含まれます。この形式は、対応するイメージでの境界ボックスの左上隅の位置とサイズを指定します。
threshold — オーバーラップしきい値
0.5 (既定値) | 数値スカラー
グラウンド トゥルース ボックスに割り当てられた検出のオーバーラップしきい値。数値スカラーとして指定します。オーバーラップ率は、Intersection over Union として計算されます。
出力引数
バージョン履歴
R2017a で導入You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)