Read Current Joint Angles from KINOVA Gen3 Robot Arm
This example shows you how to connect to the KINOVA Gen3 7-DoF Ultralightweight Robot arm with Simulink® using Robot Operating System (ROS). This includes ROS message Subscribe block to get feedback from the robot.
Products Required
MATLAB®
Simulink
Robotics System Toolbox™
ROS Toolbox™
Hardware Required
KINOVA® Gen3 Robot
Introduction
Robotics System Toolbox Support Package for Manipulators enables you to control manipulators using MATLAB and Simulink. This support package utilizes ROS packages provided by robot manufacturers to acquire various sensor data, simulate robot models, and control the robot. You can prototype algorithms and perform simulations of these robots using rigid body tree models from Robotics System Toolbox™ or Simscape™ Multibody™ robot models. This support package also allows you to connect with the robot hardware to test and validate your algorithms.
In this example, sensor_msgs/JointState ROS message is used to get current joint configuration of Kinova® Gen3 robot.
Prerequisites
If you are new to Simulink, watch the Simulink Quick Start.
Perform the initial of the support package using Hardware Setup screens and select ROS interface in step 2.
Refer to Connect to the Kinova Gen3 Robot and Initiate Required ROS Nodes to Control the Robot for information on the communication interface between MATLAB and the robot. Execute the steps to initiate required ROS nodes.
Model
Open the manipdemo_getAnglesROS model.
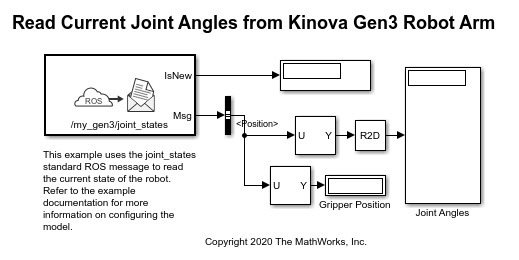
The model consists of a ROS subscriber block which is configured for /my_gen3/joint_states ROS topic. As explained in the Github page of Kinova Robotics, the first part of the ROS topic, 'my_gen3' might be different based on the robot name set during the roslaunch command. The joint angles and gripper position is extracted from the received message and then displayed using Display blocks.
Run the Model
After launching required ROS nodes and connecting to the ROS network, click Simulate on the Simulink toolbar and then click Run. The Display blocks in Simulink displays the current joint angles and gripper position of the robot.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)