このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
独立ネットワークの風力タービン非同期発電機
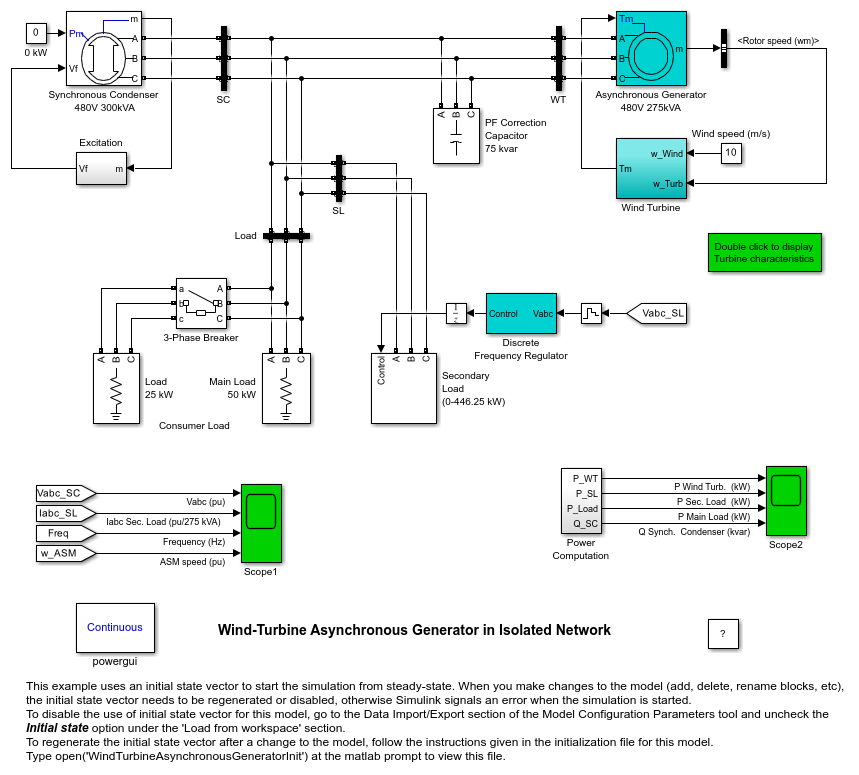
この例では、独立ネットワークの風力タービン非同期発電機を示します。
R. Reid, B. Saulnier, R. Gagnon; Hydro-Quebec (IREQ)
説明
この例では、高浸透率、電力ストレージなし、風力ディーゼル (HPNSWD) システムの汎用モデルが示されています [1]。このテクノロジーは、遠隔の北部コミュニティにおける電力供給のコストを削減するために、Hydro-Quebec によって開発されました [2]。このシステムにおける風力の最適な比率 (導入される風力容量/ピーク電力需要) は、サイトでの燃料配送費と利用可能な風力リソースによって異なります。HPNSWD テクノロジーは、1999 年、アラスカ州セント ポール島の Northern Power Systems (米国、バーモント州) によりはじめて商業的に利用されました [3]。この例で示す HPNSWD システムでは、480 V、300 kVA の同期機、480 V、275 kVA 誘導発電機を駆動する風力タービン、50 kW の顧客負荷および可変二次負荷 (0 から 446.25 kW まで) が使用されています。
風速が低い場合、負荷への電力供給には誘導発電機とディーゼル駆動同期発電機の両方が必要です。風力が負荷需要を超えるときは、ディーゼル発電機をシャットダウンすることが可能です。この全風力モードでは、同期機は同期コンデンサとして使用され、その励磁システムによって送電系統の電圧がノミナル値となるよう制御します。二次負荷バンクは、消費需要を超える風力電力を吸収して、システム周波数を制御するために使用されます。
Wind Turbine ブロックでは 2 次元ルックアップ テーブルを使用して、タービンのトルク出力 (Tm) を風速 (w_Wind) およびタービン速度 (w_Turb) の関数として計算します。この例を開いたとき、Pm (w_Wind、w_Turb) 特性はワークスペースに自動的に読み込まれています (配列 psbwindgen_char)。タービンの特性を表示するには、Wind Turbine ブロックの下にあるブロックをダブルクリックします。
Secondary Load ブロックは、GTO サイリスタ スイッチに直列接続された 8 組の三相抵抗器で構成されています。各組の定格電力は二進数表現に従い、負荷は 0 から 446.25 kW まで 1.75 kW 間隔で変えることができます。GTO は理想的なスイッチによってシミュレーションが実行されます。
周波数は Discrete Frequency Regulator ブロックによって制御されます。このコントローラーでは、標準の三相位相同期回路 (PLL) システムを使用して、システム周波数を測定します。測定された周波数は基準周波数 (60 Hz) と比較され、周波数の誤差が取得されます。この誤差は、位相誤差を取得するために統合されます。その上で、位相誤差は比例微分 (PD) コントローラーで使用されて、必要な二次負荷電力を表す出力信号が生成されます。この信号は 8 ビットのデジタル信号に変換され、8 つの三相二次負荷の切り替えを制御します。電圧の外乱を最小化するため、切り替えは電圧のゼロクロッシングにおいて実行されます。
シミュレーション
例における風速 (10 m/s) は、風力タービンが負荷に十分な電力を供給する大きさです。ディーゼル発電機 (シミュレーションなし) は停止し、同期機は、機械動力 (Pm) が 0 に設定された状態で同期コンデンサとして動作します。例では、追加の 25 kW 顧客負荷にスイッチが入ったときの、周波数制御システムの動特性が示されます。
シミュレーションを開始して、電圧、電流、電力、非同期機の速度およびシステム周波数を 2 つのスコープで観察します。初期条件 (xInitial ベクトル) は自動的にワークスペースに読み込まれているので、シミュレーションは定常状態で開始します。
非同期機が発電機モードで動作するとき、その速度は同期速度 (1.011 pu) をわずかに上回ります。タービンの特性に従い、10 m/s の風速に対しタービンの出力電力は 0.75 pu (206 kW) となります。非同期機の損失のため、風力タービンは 200 kW の電力を生み出します。主要負荷は 50 kW なので、60 Hz の一定周波数を維持するため、二次負荷によって 150 kW が吸収されます。t=0.2 秒で、25 kW の追加負荷のスイッチが入ります。周波数は一時的に 59.85 Hz に下がり、周波数制御器が反応して二次負荷の吸収する電力を減らし、周波数を 60 Hz に戻します。電圧は 1 pu に留まり、フリッカーは観察されません。
初期条件の再生成
この例は、シミュレーションが定常状態で開始されるようにすべて初期化された状態でセットアップされています。初期条件は、"WindTurbineAsynchronousGenerator.mat" ファイルに保存されています。このモデルを開くと、InitFcn コールバック ([モデル プロパティ]、[コールバック] 内) によってこの .mat ファイルの内容 ("xInitial" 変数) がワークスペースに自動的に読み込まれます。
このモデルを変更するか、電力コンポーネントのパラメーター値を変更すると、"xInitial" 変数に保存された初期条件は無効になり、Simulink® によりエラー メッセージが表示されます。変更したモデルの初期条件を再生成するには、以下に示した手順に従います。
1. [コンフィギュレーション パラメーター] ペインで、[初期状態] パラメーターをオフにして、[最終状態] パラメーターをオンにします。
2. 3-Phase Breaker ブロックをダブルクリックし、ブレーカーの切り替えを無効にします (A、B、C 各相の [Switching of phase X] パラメーターを選択解除)。
3. シミュレーション終了時間を 20 秒に変更します。60 Hz 周波数と位相のそろった初期条件を生成するには、終了時間は 60 Hz サイクルの整数でなければなりません。
4. シミュレーションを開始します。シミュレーションが完了したら、スコープに表示される波形を観察して、定常状態に達したことを確認します。"xFinal" 配列に保存されている最終状態は、次回のシミュレーションで初期状態として使用できます。次の 2 つのコマンドを実行すると、これらの最終状態が "xInitial" にコピーされ、この変数が新しいファイル (MyModelInit.mat) に保存されます。
>> xInitial=xFinal;
>> save MyModelInit xInitial
5. [モデル プロパティ] ペインの [InitFcn] ウィンドウで、初期化コマンドの最初の行を "load MyModelInit" に置き換えます。次回、このモデルを開くと、MyModelInit.mat ファイルに保存された変数 xInitial がワークスペースに読み込まれます。
6. [コンフィギュレーション パラメーター] ペインで、[初期状態] をオンにします。
7.シミュレーションを開始し、モデルが定常状態で開始したことを確認します。
8. 3-Phase Breaker ブロックをダブルクリックし、ブレーカーの切り替えを再度有効にします (A、B、C 各相の [Switching of phase X] パラメーターをオンにする)。
9. シミュレーション終了時間を 5 秒に戻します。
10. モデルを保存します。
参考文献
[1] R. Gagnon, B. Saulnier, G. Sybille, P. Giroux; "Modeling of a Generic High-Penetration No-Storage Wind-Diesel System Using MATLAB®/Power System Blockset" 2002 Global Windpower Conference, April 2002, Paris, France
[2] B. Saulnier, A.O. Barry, B. Dube, R. Reid; "Design and Development of a Regulation and Control System for the High-Penetration No-Storage Wind/Diesel Scheme" European Community Wind Energy Conference 88, 6-10 june 1988, Herning, Denmark
[3] L. Mott (NPS), B. Saulnier (IREQ) " Commercial Wind-Diesel Project, St. Paul Island, Alaska" 14th Prime Power Diesel Inter-Utility Conference, May 28-June 2, Winnipeg, Manitoba, Canada
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)