第 1 および第 2 象限チョッパーの制御
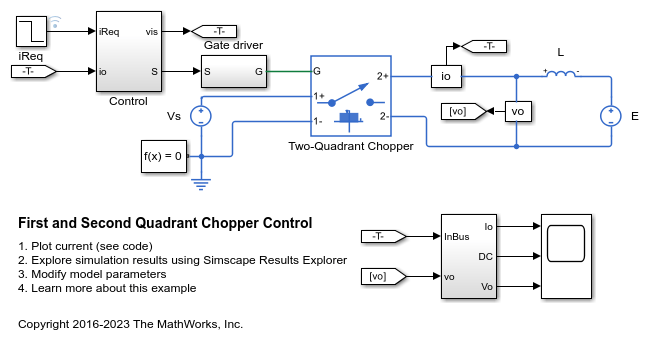
この例では、2 象限チョッパーを制御する方法を説明します。この 2 象限チョッパーは第 1 象限と第 2 象限で動作し、正と負の出力電流が許可されます。Control サブシステムは、出力電流を制御するために、単純な PI ベースの制御アルゴリズムを実装します。システムの負荷はシミュレーション全体を通じて一定と見なされます。
モデル
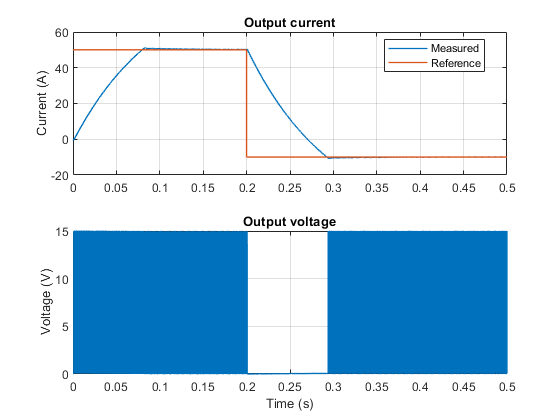
Simscape ログからのシミュレーション結果
以下のプロットは、テストでの要求電流と測定電流、および回路における出力電圧を示しています。
リアルタイム シミュレーションの結果
この例は、以下のプラットフォームでテストされました。
Intel® 3.5 GHz i7 マルチコア CPU と 4 GB の RAM を搭載した Speedgoat™ Performance リアルタイム ターゲット マシン。
3.5 GHz の Intel® Core XEON E3-1275v3 と 4 GB の RAM を搭載した dSPACE® SCALEXIO LabBox。
Simscape のローカル ソルバーを使用することで、このモデルを 20 マイクロ秒のステップ サイズでリアルタイム実行できます。サンプル レートが小さい場合、コールド キャッシュが原因で、最初のタスク実行中にタスク オーバーランが発生する可能性があります。このオーバーランを回避するには、選択したプラットフォームがこれらのオプションをサポートしている場合、タスク オーバーランの数を制限するか、リアルタイム アプリケーションの起動フェーズにおいてタスクのオーバーラン許容回数を制限するか、周期タスクのサンプル時間を延長することで、起動時の動作を緩和できます。
参考
Two-Quadrant Chopper | Two-Pulse Gate Multiplexer