このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
AC6 - PM 同期 3HP モーター ドライブ
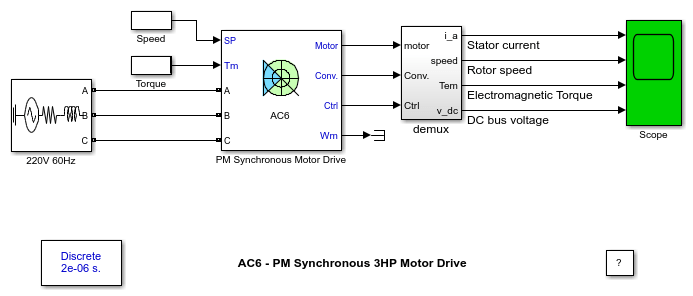
この例では、速度制御時の AC6 PM 同期モーター ドライブを示します。
H.Blanchette, L.-A. Dessaint (Ecole de technologie superieure, Montreal)
説明
この回路では Specialized Power Systems ライブラリの AC6 ブロックを使用します。これは、3 HP モーター用のブレーキ チョッパーを伴う永久磁石 (PM) 同期モーター ドライブをモデル化したものです。
PM 同期モーターには、Universal Bridge ブロックを使用して作成された PWM 電圧源インバーターから電力が供給されます。速度制御ループでは PI 制御器を使用して、ベクトル コントロール ブロックの磁束とトルクの基準を生成します。ベクトル コントロール ブロックは、この磁束とトルクの基準に対応するモーターの 3 つの基準線電流を計算し、三相電流制御器を使用してこれらの電流をモーターに供給します。
モーターの電流、速度、トルクの信号は、ブロックの出力で得られます。
シミュレーション
シミュレーションを開始します。モーターの固定子電流、回転子角速度、電磁トルクおよび DC 母線電圧を Scope で観察できます。速度指令値およびトルク指令値も表示されます。
t = 0 秒の時点で、速度指令値は 300 rpm です。速度が加速ランプに正確に追従していることを観察します。
t = 0.5 秒で、全負荷トルクがモーターに加えられます。モーター回転数に小さな外乱が観測されますが、すぐに安定化します。
t = 1 秒では、速度指令値は 0 rpm に変化します。速度は減速ランプに正確に追従して、0 rpm に減少します。
t = 1.5 秒で、機械的負荷が 11 Nm から -11 Nm に変化します。小さなオーバーシュートの後、モーター回転数は速やかに安定化します。
最後に、シミュレーションを通して DC 母線電圧が効果的に制御される様子に注目してください。
メモ:
1) 電力システムは 2 us のタイム ステップで離散化されています。速度コントローラーは 140 us のサンプル時間を、ベクトル コントローラーは 20 us のサンプル時間を使用して、マイクロコントローラー制御デバイスのシミュレーションを実行しています。
2) 平均値インバーターを使用した簡略化バージョンのモデルは、グラフィカル ユーザー インターフェイスで [Model detail level] メニューの [平均値] を選択すると使用できます。ここで、タイム ステップは最大 75 us まで増やせます。これを行うには、この例の場合ならワークスペースで「Ts = 75e-6」と入力し、ベクトル制御のサンプル時間を 75e-6 に設定し、速度コントローラーのサンプル時間を 150e-6 に設定します。ac6_example_simplified モデルも参照してください。
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)