このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
マルチボディ ダイナミクス
マルチボディ ダイナミクスとは、ジョイントで接続された複数の剛体や可とう体で構成される機械システムの動的な挙動の学問です。これらのボディは、加えられた力、トルク、および拘束によって発生する並進運動または回転運動を行います。Simscape™ Multibody™ を使用すると、ロボット、車両、建設機械、航空機着陸装置などの複雑なシステムについて、マルチボディ ダイナミクスのシミュレーションを実行できます。力、トルク、および運動の入力を指定してモデルを駆動し、モデルの動的応答をシミュレートすることができます。
ボディのペアの間に自由度を指定するには、Joints and Constraints ライブラリのブロックを使用します。たとえば、Prismatic Joint ブロックと Revolute Joint ブロックを使用して、スライダークランク機構の直線運動と回転運動をモデル化できます。Point on Curve Constraint ブロックを使用して、ローラー コースターと軌道の間の拘束をモデル化できます。
ボディに作用する力とトルクをモデル化するには、Forces and Torques ライブラリのブロックを使用します。たとえば、Magic Formula Tire Force and Torque ブロックを使用して、タイヤと地面の間の力とトルクをモデル化できます。ロボットが物をつかむような接触問題をモデル化するときには、Spatial Contact Force ブロックを使用して、ボディのペアの間で作用する力をシミュレートできます。
複数のボディ間の相対運動を測定するには、Transform Sensor ブロックを使用できます。力とトルクを測定するには、Constraints、Joints、および Forces and Torques の各ライブラリのブロックを使用できます。ジョイントにおけるボディの負荷はジョイント ブロックで測定でき、拘束ブロックはボディのペアの間の拘束を維持する力とトルクを検出できます。これらの量のそれぞれが、機械システムのマルチボディ ダイナミクスの解析で重要な不明点を解決するために役立ちます。
クラス
Simscape ブロック
トピック
力、トルクおよび運動の各出力の検出
- さまざまなパラメーター値での運動の解析
さまざまなカプラー リンク長で 4 節リンク機構モデルのシミュレーションを実行し、結果のカプラー曲線をプロット。 - 検出
検出可能な動的変数およびその検出に使用できるブロック。 - Transform Sensor ブロックを使用した運動の検出
Transform Sensor ブロックを使用して、単純なマルチボディ モデルにおける座標系の運動を検出する。 - ジョイントの拘束力の測定
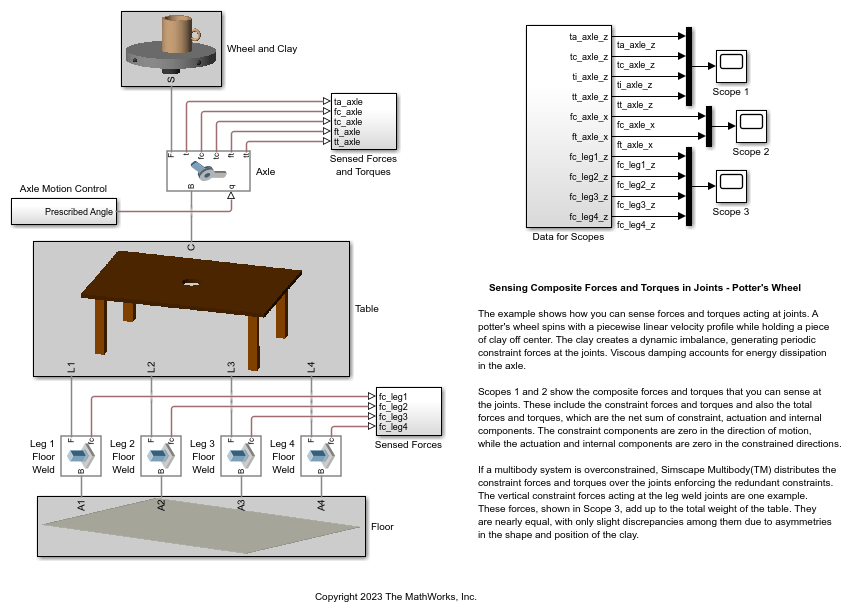
ジョイント ブロックの検出機能を使用し、機械的リンクに作用する内力の検出。 - ジョイントに作用する力とトルクの測定
ジョイント ブロックの検出機能を使用し、ジョイントに作用する力とトルクの測定。
力、トルクおよび運動の各入力の指定
- 2 つの固体間の接触力のモデル化
Spatial Contact Force ブロックを使用して、固体ブロック間の垂直抗力と摩擦力をモデル化する。 - 斜面を転がり下りる中実円柱
Spatial Contact Force ブロックを使用して、斜面を転がり下りる中実円柱をモデル化する。 - 惑星系における重力のモデル化
Cartesian Joint ブロックと Gravitational Field ブロックを使用して、重力で拘束された自由なボディのシステムを組み立てる。 - 平面マニピュレーター モデルにおけるジョイントの運動の指定
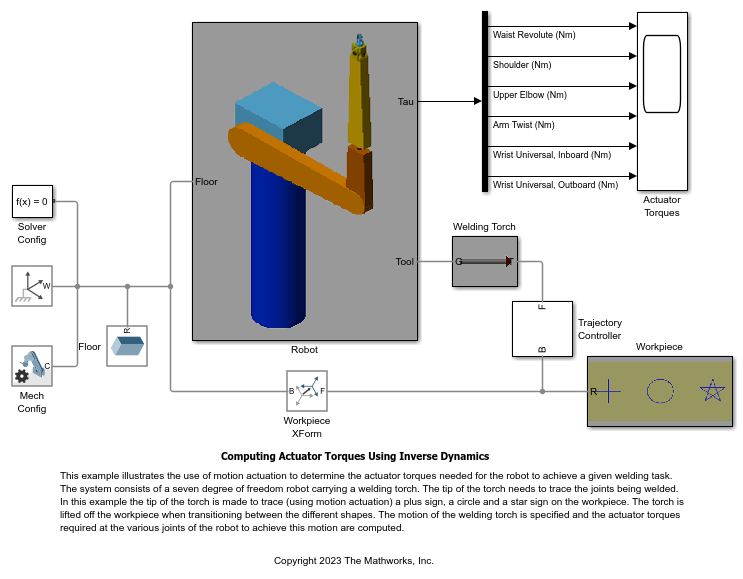
ジョイント ブロックの作動機能を使用し、座標系の軌跡を指定。 - ジョイントの作動トルクの指定
ジョイント ブロックの作動機能を使用し、ジョイントの作動トルクの指定。 - ジョイントのモーション プロファイルの指定
ジョイント ブロックの作動機能を使用し、座標系の軌跡を指定。 - 接触プロキシを使用した接触のシミュレート
接触プロキシを使用して、接触シミュレーションの速度とロバスト性を高める。
力とトルクの指定
- 物理量信号による作動と検出
物理量信号を使用した作動入力の指定と検出出力の取得。 - ジョイント作動の制限
ジョイント ブロックに運動の作動入力があるモデルについての制限と特別な考慮事項。 - システム ダイナミクスのモデル化と測定
力、トルク、位置、その他の力学的量を設定し検出するためのワークフロー ステップ。 - 重力のモデル化
一様な重力、重力場および個々の重力の影響のモデル化。ボディの境界に対するソフトウェアの定義とその重力トルクへの影響。 - ジョイントの作動入力の指定
ジョイントの作動モード、運動入力の取り扱い、およびモデル アセンブリとシミュレーションの主な違い。
注目の例









You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)