Vehicle Applications
Simscape™ Driveline™ can model complete vehicle systems. These examples demonstrate various vehicle models.
Featured Examples

Abstract Combustion Engine Car
An abstract passenger car model having an internal combustion engine.

Four-Wheel Drive Testbed
A four-wheel drive vehicle with open and limited slip differentials. The front and rear differentials can be standard or Type I Torsen. The center differential can be a solid shaft, viscous coupling, viscous coupling with a locking clutch, or open with no torque transfer. The differential options are in variant subsystems. The variants can be selected using the hyperlinks embedded in the model.

Anti-Lock Braking System (ABS)
A simple way of modeling an ABS braking system. The model shows the velocity profile responses achieved for the vehicle CG and the wheels.

Limited Slip Differential with Clutches
A comparison between the behavior of an open differential and a limited slip differential with clutch packs. The limited slip differential is modeled using components from the Gears library and Clutches library in Simscape™ Driveline™. Wheel slip is limited by clutches that engage when the torque applied to the input of the differential exceeds a threshold. The clutches lock the differential so that the output shafts of the differential spin at the same speed.

Piston Engine Testbed
The effect of varying the number of cylinders in a piston engine. Four, six, and eight cylinder engines are included with firing offsets evenly distributed about their four-stroke cycles. Piston pressures are normalized by the number of cylinders to emphasize the effect on output vibration.
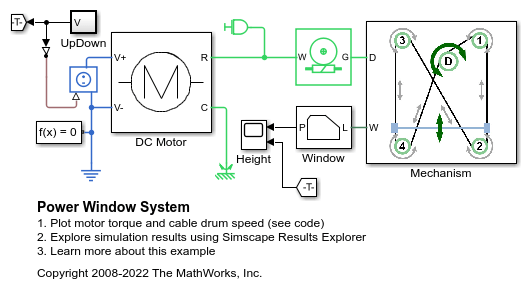
Power Window System
A motor-driven power window system. A DC motor drives the power window mechanism via a self-locking worm gear with the ratio 1 : 50. The power window mechanism consists of a cable drum and four pulleys all connected by a cable. The window is attached to the cable at two points by the lift plate. This ensures both sides of the window move at the same speed and in the same direction, keeping the window level. The model also includes viscous friction in the guide rails.

Torsen Differential
A comparison between the behavior of an open differential and a Torsen limited slip differential. The Torsen differential is modeled using components from the Gears library in Simscape™ Driveline™. Slip is limited in the Torsen differential because it uses non-backdrivable worm gears, which are modeled by Sun-Planet Worm Gear components. The result is higher torque applied to the wheel with greater traction, and identical speeds for the left and right axles.

Two Mode Hybrid Transmission
The basic architecture of a two mode hybrid transmission. It consists of three planetary gear sets and four clutches. This combination permits four fixed gear ratios plus two power-split modes. The power split modes are used to transition between fixed gear ratios and for heavy acceleration/deceleration. The fixed ratios help with efficiency when cruising. For the first power split (input-split regime), only Clutch 1 is engaged. For the second power split (compound-split regime), only Clutch 2 is engaged. Engaging two clutches simultaneously removes one degree of freedom and hence results in a fixed ratio.

Vehicle in Simscape Driveline and Simulink
Two equivalent simplified vehicles modeled in Simscape™ Driveline™ and Simulink®. The simulation results are identical, and the Simscape Driveline model is easily extensible to include different effects and a higher level of modeling fidelity. Meshing losses in the gears and more detailed tire modeling can be added without introducing algebraic loops.

Vehicle with Dual Clutch Transmission
A vehicle with a five-speed dual-clutch transmission. Gear shifts are implemented via the two clutches, one clutch pressure being ramped up as the other clutch pressure is ramped down. Gear pre-selection via dog clutches ensures that the correct gear is fully selected before the on-going clutch is enabled.

Vehicle with Four-Speed Transmission
A complete vehicle with Simscape™ Driveline™ components, including the engine, drivetrain, four-speed transmission, tires, and longitudinal vehicle dynamics. The transmission controller is implemented as a state machine in Stateflow®, selecting the gear based on throttle and vehicle speed.

Vehicle with Four-Wheel Drive
A four-wheel drive vehicle starting from rest and ascending a 15 degree incline. Initially the vehicle rolls backward until the engine develops sufficient torque to counter the slope. The tire compliance dynamics can be seen as the vehicle starts to accelerate. The model variant chosen for all of the tires can be set to the Simple, Friction Parameterized, or Magic Formula tire model using the hyperlinks in the model.

Vehicle with Manual Transmission
A vehicle that has a four-speed manual transmission. The key elements of the transmission are four synchronizers. By engaging or disengaging these synchronizers and associated dog clutches, the transmission provides four ratios 3.581, 2.022, 1.384, and 1, respectively. The synchronizers are modeled using the Cone Clutch and Dog Clutch blocks.
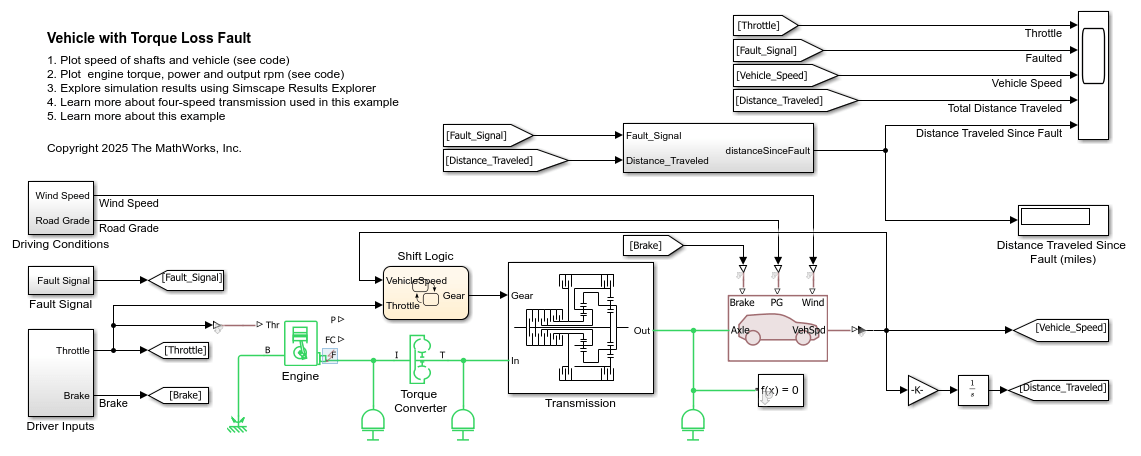
Vehicle with Torque Loss Fault
Effect of engine torque loss on the vehicle speed, clutch states, and engine variables including torque, rotational speed and power. This example includes a model of vehicle with four-speed transmission that experiences engine fault while in motion. The vehicle experiences loss of torque at specific time and the example models the vehicle response under the faulted condition. The engine loses torque while in faulted state. As a result of loss of torque, the engine stops producing power. Even though the driver continues to throttle, the engine does not produce any power after the fault occurs. The model simulates the distance traveled by vehicle from the moment the torque loss occurs until the vehicle comes to a complete stop.

Fixed Caliper Disk Brake
Model, parameterize, and test a caliper disk brake. The example uses numerical data extracted from the tandem primary cylinder datasheet to identify an optimal design for the caliper disk brake. The example shows how to generate a compliance curve for the caliper disk brake.