Wind-Powered Vehicle with Propeller
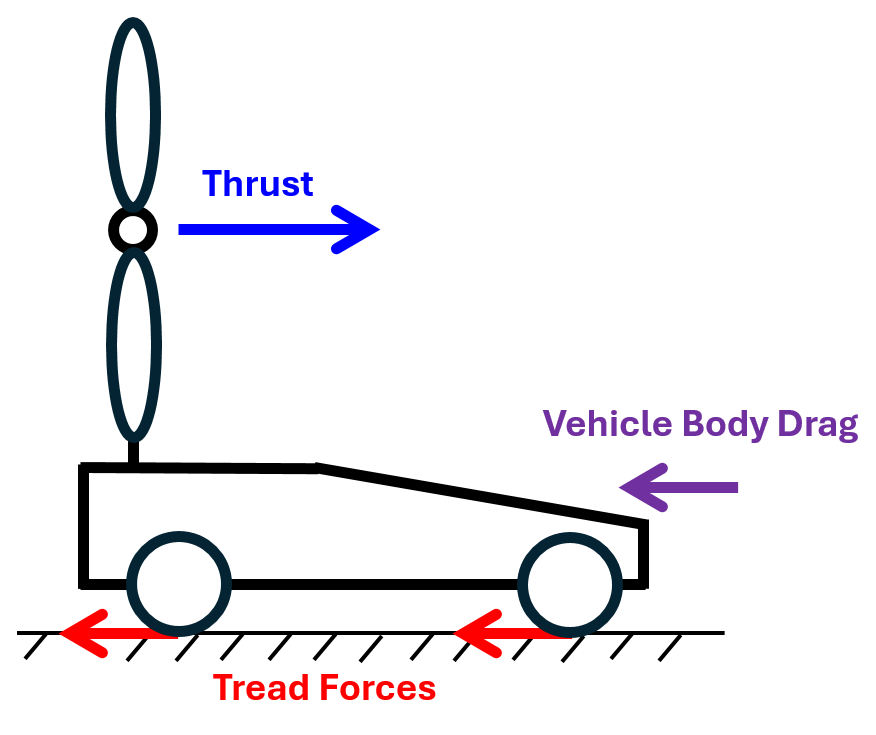
This example shows a wind-powered four-wheel vehicle that can travel faster than the wind. The wind blows from the rear to the front of the vehicle, and the propeller thrust is the driving force. The forces acting on the vehicle are the propeller thrust, the vehicle body drag, and the tread forces. When the vehicle speed exceeds the wind speed, the direction of the drag force reverses to oppose the motion of the vehicle. The test vehicle known as Blackbird experimentally demonstrated this concept. The vehicle can travel faster than the wind because the thrust force can overcome the drag and tread forces. The figure shows the directions of the forces that the vehicle experiences when it moves faster than the wind.
Model
The example model represents a vehicle that consists of a propeller, a vehicle body, a driveshaft, a gear box, and four wheels. The propeller connects to the driveshaft through the gear box. The four wheels and driveshaft have rotational inertias, and the vehicle body has an associated mass. The gear box imposes a kinematic constraint between the angular velocities of the propeller and the driveshaft with a fixed gear ratio. This constraint makes the propeller rotate and displace air from front to rear as the wheels rotate in the direction advancing the vehicle. The propeller displacing air from front to rear is subject to an aerodynamic torque, and the kinematic constraint makes this torque hinder the advance of vehicle. The initial model uses an Aerodynamic Propeller block parameterized by Tabulated data for advance angle. Open the model.
open_system("WindPoweredVehicleWithPropeller");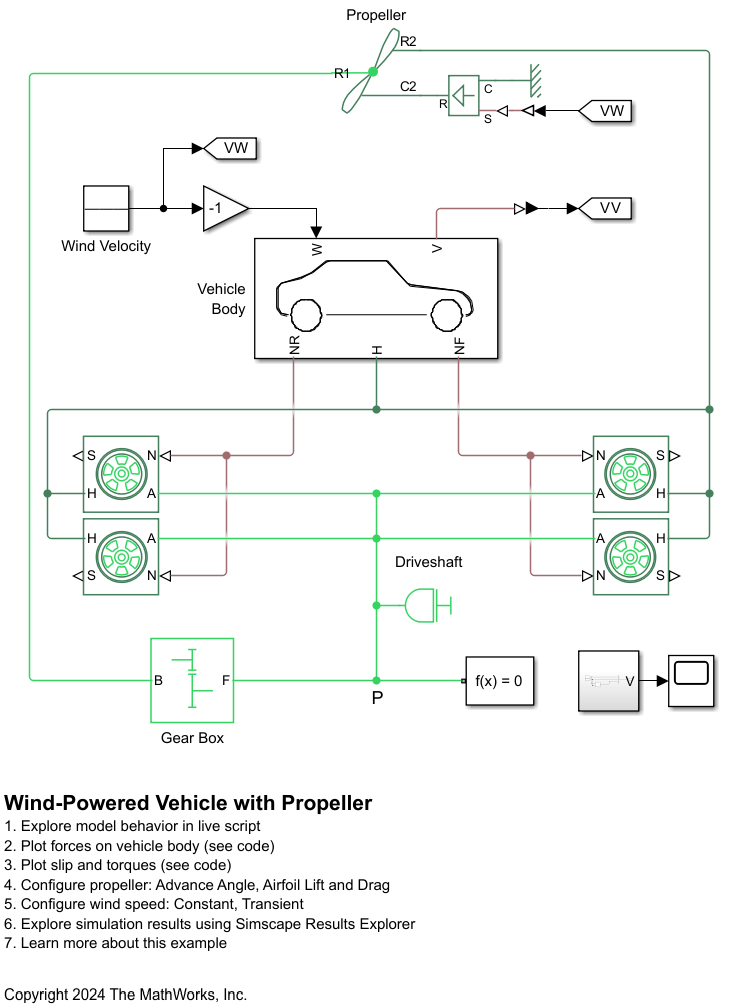
Constant Wind Velocity
The initial model specifies the wind speed to 10 m/s. Double-click the Wind Velocity block.
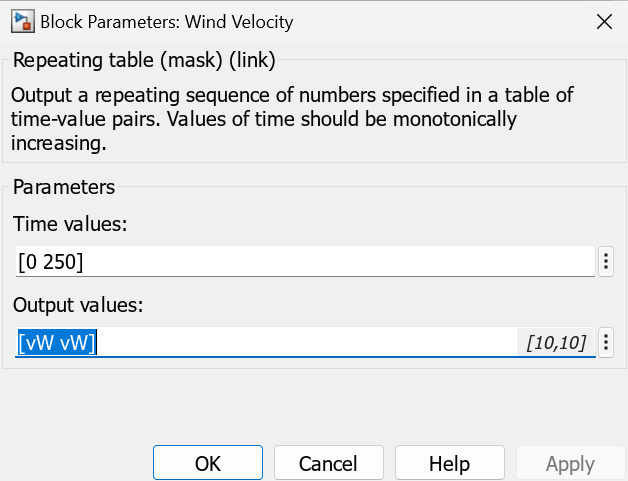
Run the model. The vehicle velocity exceeds the wind velocity at 63 seconds.
sim("WindPoweredVehicleWithPropeller"); open_system("WindPoweredVehicleWithPropeller/Scope");
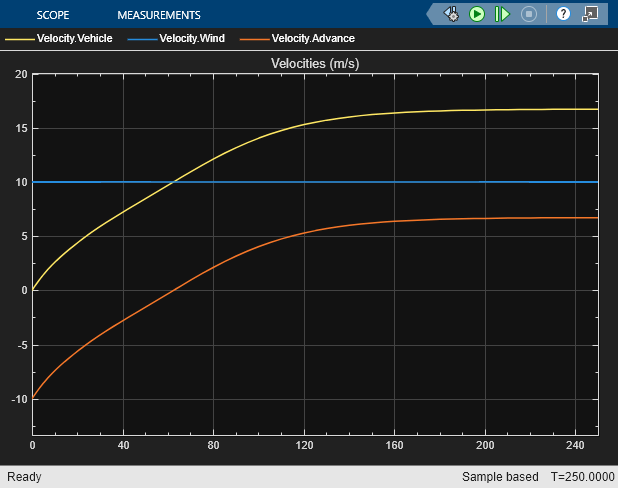
The advance velocity equals the vehicle velocity minus the wind velocity.
Forces and Torques
Plot the forces acting on the vehicle.
WindPoweredVehicleWithPropellerPlot1Forces
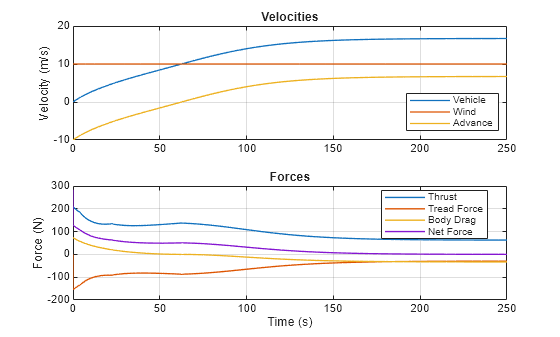
The Tread Force plot shows the sum of all tread forces to the wheels. Positive forces correspond to forward vehicle motion. The positive net force approaches to zero as the vehicle velocity approaches a steady-state.
Plot the wheel slip and the torque flow balance at the location P shown on the canvas. All wheels experience the same slip because they have the same angular velocity and radius. The wheels are modeled using Tire (Magic Formula) blocks.
WindPoweredVehicleWithPropellerPlot2Slip
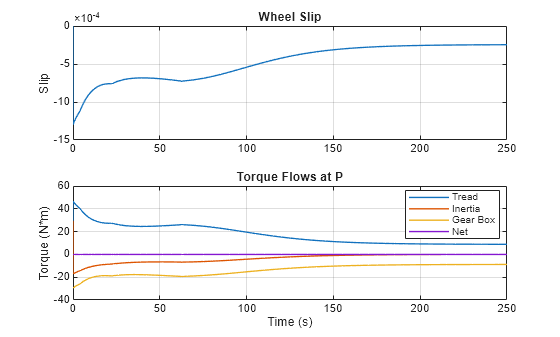
The negative slip means that the vehicle velocity is greater than the wheel circumferential velocity, and the tread forces act to slow down the vehicle. These forces result in the tread torque that balances the torque provided to the gear box for the propeller as well as torques to accelerate wheels and the driveshaft. The net torque flow is always zero, and the gear box torque compensates the tread torque at the steady-state.
Advance Angle
When you set Parameterization to Tabulated data for advance angle, the Aerodynamic Propeller block uses quadrants to determine the thrust and torque coefficients from the advance angle. Plot the thrust coefficient and torque coefficient vectors with respect to the advance angle vector. The magnitude of the thrust coefficient is typically much larger than that of the torque coefficient.
% Plot thrust and torque coefficient vectors param_beta = str2num(get_param("WindPoweredVehicleWithPropeller/Propeller","beta_TLU"))'; % Advance angle vector (deg) param_Ct = str2num(get_param("WindPoweredVehicleWithPropeller/Propeller","Ct_TLU_1D"))'; % Thrust coefficient vector param_Cq = str2num(get_param("WindPoweredVehicleWithPropeller/Propeller","Cq_TLU_1D"))'; % Torque coefficient vector figure, subplot(2,1,1); plot(param_beta, [param_Ct, -10*param_Cq], "LineWidth", 1); title("Thrust and Torque Coefficients") xlabel("Advance Angle (deg)"); xlim([0 360]); ylabel("Coefficient"); legend({"C_T","-10C_Q"}, "Location", "best"); grid on
Plot the advance angle.
simlog_t = simlog_WindPoweredVehicleWithPropeller.Propeller.beta.series.time; % Time (s) simlog_beta = simlog_WindPoweredVehicleWithPropeller.Propeller.beta.series.values("deg"); % Advance angle (deg) subplot(2,1,2); plot(simlog_t, simlog_beta, "LineWidth", 1); title("Advance Angle"); xlabel("Time (s)"); xlim([0 simlog_t(end)]); ylabel("Angle (deg)"); grid on
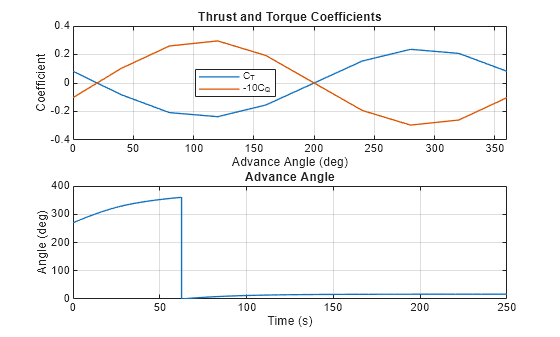
The advance angle remains in the fourth quadrant (270 - 360) in the initial period when the vehicle has negative advance velocity and shifts to the first quadrant (0 - 90) when the vehicle velocity exceeds the wind velocity. The advance angle is 17 at the steady-state. Both coefficients are positive throughout the simulation.
Steady State Analysis
When the vehicle velocity reaches steady-state,
In the Gear Box block, the aerodynamic torque from the propeller balances the torques generated by tread forces.
Substitute the first equation into the second to obtain a steady-state relation.
Plot the aerodynamic torque versus the thrust plus body drag, which represents possible driving conditions. Compare this plot to the stead state relation.
n = 0:0.1:3; % Propeller angular velocity (Hz) vW = 10; % Wind speed (m/s) vV = radiusWheel * (2*pi*n)/gearRatio; % Vehicle velocity (m/s) vA = vV - vW; % Advance velocity (m/s) vR_squared = vA.^2 + (0.7 * propDiameter * pi * n).^2; % Relative advance velocity squared (m^2/s^2) beta = wrapTo360(atan2(vA, 0.7*pi*n*propDiameter)/2/pi*360); % Advance angle (deg) torque = interp1(param_beta, param_Cq, beta, "linear", "extrap") ... * 1/8 * airDensity .* vR_squared * pi * propDiameter^3; % Torque (N*m) thrust = interp1(param_beta, param_Ct, beta, "linear", "extrap") ... * 1/8 * airDensity .* vR_squared * pi * propDiameter^2; % Thrust (N) drag = -1/2 * airDensity * dragCoeff * area * (vV - vW).^2 .* sign(vV - vW); % Vehicle body drag (N) figure, plot(thrust + drag, torque, "LineWidth", 1); hold on; plot(-50:1:50,radiusWheel/gearRatio*(-50:1:50), "LineWidth", 1); xlabel("Thrust + Body Drag (N)"); xlim([-50 50]); ylabel("Aerodynamic Torque (N*m)"); legend("Torque vs. (Thrust + Body Drag)", "Steady State Relation", "Location", "best"); title("Steady State Analysis"); grid on
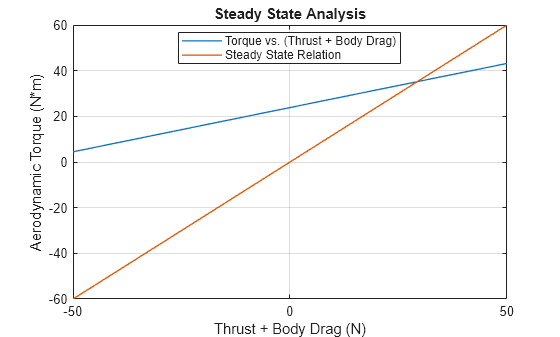
The intersecting point of the two curves is the steady-state solution. The coordinate of the intersection is
Verify the coordinate with the simulation result.
torque = simlog_WindPoweredVehicleWithPropeller.Propeller.Q.series.values("N*m"); steadyStateTorque = torque(end); disp("Aerodynamic torque at steady-state is " + steadyStateTorque + " N*m");
Aerodynamic torque at steady-state is 35.3149 N*m
The slope, , of the steady-state curve determines the location of the intersection. Increasing the slope of the curve causes the two curves to intersect at a lower aerodynamic torque. Increase the slope by changing the wheel radius from 0.3 m to 0.4 m and verify that the steady-state torque decreases.
radiusWheel = 0.4;
sim("WindPoweredVehicleWithPropeller");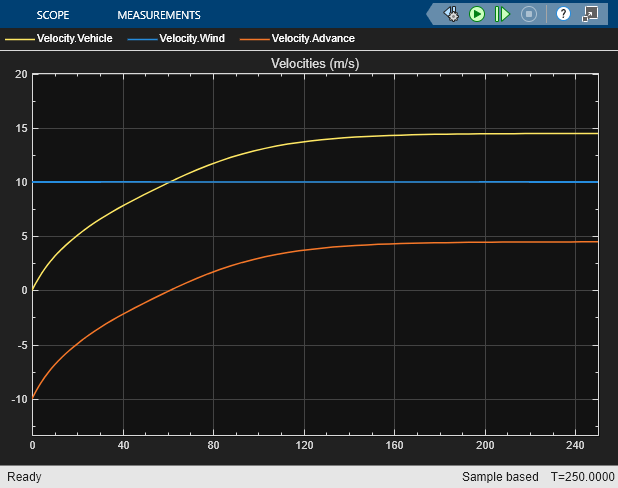
torque = simlog_WindPoweredVehicleWithPropeller.Propeller.Q.series.values("N*m"); steadyStateTorque = torque(end); radiusWheel = 0.3; disp("Aerodynamic torque at steady-state with the increased wheel radius is " + steadyStateTorque + " N*m");
Aerodynamic torque at steady-state with the increased wheel radius is 12.8656 N*m
Airfoil Lift and Drag Coefficients Parameterization
You can use a first-principle representation with the Aerodynamic Propeller block. Configure the propeller to use the Tabulated data for airfoil lift and drag coefficients parameterization. This parameterization specifies lift and drag coefficients over the radial distance of the blade and uses Blade Element Theory to obtain the thrust and torque exerted on the propeller.
set_param("WindPoweredVehicleWithPropeller/Propeller","parameterization","sdl.enum.AerodynamicPropellerParameterization.Airfoil") sim("WindPoweredVehicleWithPropeller")
Four-Quadrant Model from Lift and Drag Parameterization
Open the test rig model that contains an Aerodynamic Propeller block that is parameterized identically to the wind-powered vehicle Aerodynamic Propeller block.
open_system("WindPoweredVehicleWithPropellerTestRig"); sim("WindPoweredVehicleWithPropellerTestRig");
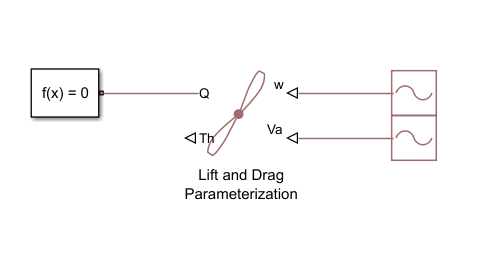
Derive an equivalent four-quadrant model using the test rig, which sweeps the advance angle from 0 to 360.
simlog_nTest = simlog_WindPoweredVehicleWithPropellerTestRig.Lift_and_Drag_Parameterization.w_in.series.values("Hz"); % Angular velocity used in test rig (Hz) simlog_vATest = simlog_WindPoweredVehicleWithPropellerTestRig.Lift_and_Drag_Parameterization.Va_in.series.values("m/s"); % Advance velocity used in test rig (m/s) simlog_qTest = simlog_WindPoweredVehicleWithPropellerTestRig.Lift_and_Drag_Parameterization.Q_out.series.values("N*m"); % Torque obtained in test rig (N*m) simlog_thTest = simlog_WindPoweredVehicleWithPropellerTestRig.Lift_and_Drag_Parameterization.Th_out.series.values("N"); % Thrust obtained in test rig (N) derived_vRTest = sqrt(simlog_vATest.^2 + (0.7*propDiameter*pi*simlog_nTest).^2); % Derived VR derived_cTTest = simlog_thTest ./ (1/8*airDensity*derived_vRTest.^2*pi*propDiameter^2); % Derived thrust coefficient derived_cQTest = simlog_qTest ./ (1/8*airDensity*derived_vRTest.^2*pi*propDiameter^3); % Derived torque coefficient derived_betaTest = wrapTo360(atan2(simlog_vATest, 0.7*pi*simlog_nTest*propDiameter)/2/pi*360); % Derived advance angle figure, subplot(2,1,1); plot(derived_betaTest, [derived_cTTest,-10*derived_cQTest], "LineWidth", 1); title("Derived Thrust and Torque Coefficients"); xlabel("Advance Angle (deg)"); xlim([0 360]); ylabel("Coefficient"); legend("C_T","-10C_Q", "Location", "best"); grid on
Compute and plot the advance angle during the simulation.
simlog_n = simlog_WindPoweredVehicleWithPropeller.Propeller.w.series.values("Hz"); % Angular velocity (Hz) simlog_vA = simlog_WindPoweredVehicleWithPropeller.Propeller.v.series.values("m/s"); % Advance velocity (m/s) derived_beta = wrapTo360(atan2(simlog_vA, 0.7*pi*simlog_n*propDiameter)/2/pi*360); % Derived advance angle (deg) simlog_t = simlog_WindPoweredVehicleWithPropeller.Propeller.w.series.time; % Time (s) subplot(2,1,2); plot(simlog_t, derived_beta, "LineWidth", 1); title("Derived Advance Angle"); xlabel("Time (s)"); xlim([0 simlog_t(end)]); ylabel("Angle (deg)"); grid on
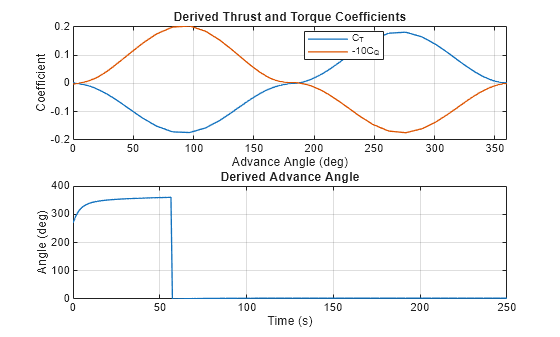
The steady-state advance angle is 3. Again, the advance angle transitions from the first to forth quadrant, generating positive thrust and torque.
Transient Wind Velocity
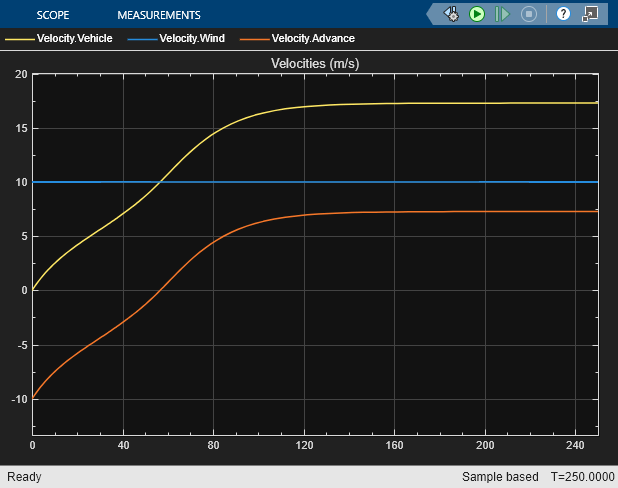
Observe the vehicle dynamics as the wind velocity changes its sign.
set_param("WindPoweredVehicleWithPropeller/Wind Velocity","rep_seq_t","[0 160 165 200 205 250.1]",... "rep_seq_y","[10 10 -2 -2 8 8]"); sim("WindPoweredVehicleWithPropeller"); open_system("WindPoweredVehicleWithPropeller/Scope");
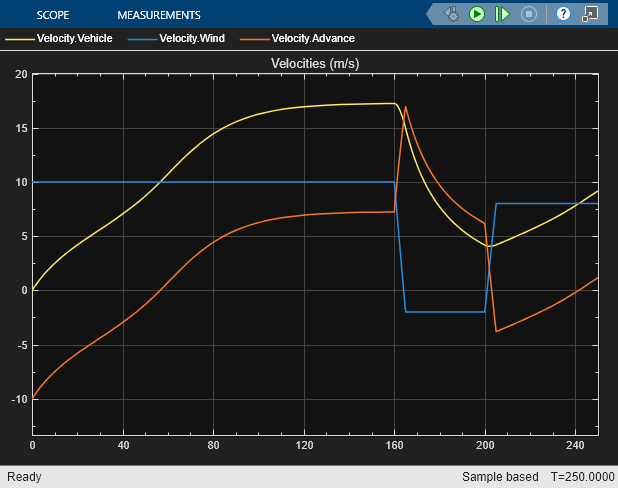
The abrupt change in wind velocity around 160 seconds causes a negative acceleration. The thrust coefficient curves shows that at the increased advance velocity, the advance angle is still in the first quadrant but increases to the point when the thrust coefficient becomes negative. The subsequent change in wind velocity around 200 seconds causes a change in the sign of the advance velocity, leading to the transition from the first quadrant to the fourth quadrant. In the fourth quadrant, the thrust coefficient is positive, causing positive acceleration in the vehicle.